Rockwell Automation 294D ArmorStart LT Distributed Motor Controller DeviceNet Version - User Manual User Manual
Page 102
102
Rockwell Automation Publication 290D-UM001A-EN-P - June 2012
Chapter 4
Bulletin 290D/291D/294D Programmable Parameters
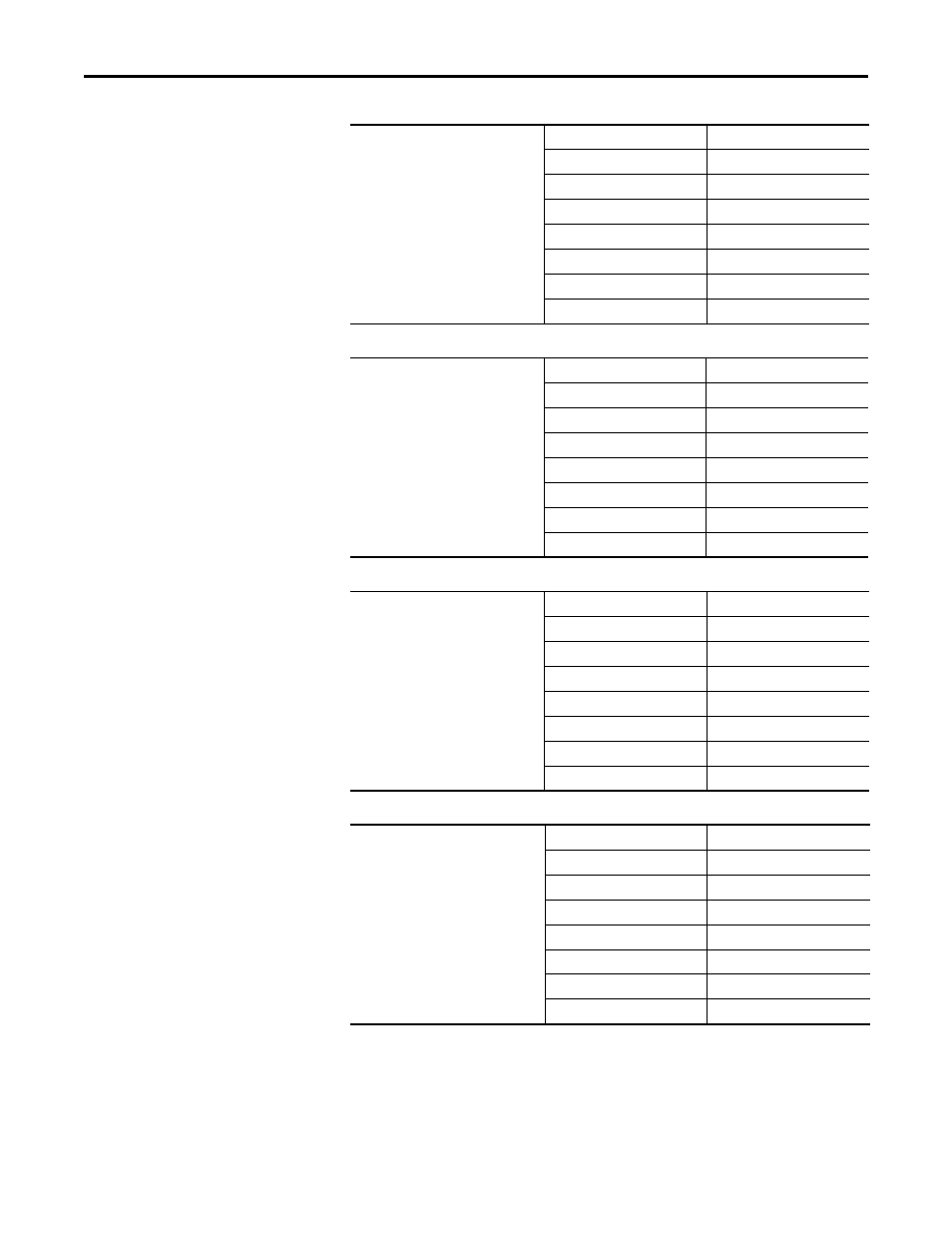
FilterOnOff
This parameter determines the input
(which must be absent for this time)
before being reported OFF.
Parameter Number
51
Access Rule
GET/SET
Data Type
USINT
Group
User I/O Config.
Units
msecs
Minimum Value
0
Maximum Value
64
Default Value
0
OutProtFltState
This parameter in conjunction with
Parameter 53 (OutProtFltValue) defines
how the starter outputs will respond when
a fault occurs.
0 = GoToPrFltValue
1 = IgnorePrFlt
Parameter Number
52
Access Rule
GET/SET
Data Type
BOOL
Group
User I/O Config.
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
OutProtFltValue
This parameter determines how the starter
outputs will be commanded in the event
of a protection fault if Parameter 52
(OutProtFltState) = 0.
0 = OFF
1 = ON
Parameter Number
53
Access Rule
GET/SET
Data Type
BOOL
Group
User I/O Config.
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0
OutNetFaultState
This parameter in conjunction with
Parameter 55 (OutNetFaultValue) defines
how the starter outputs will respond on an
Ethernet fault.
0 = GoToFaultValue
1 = HoldLastState
Parameter Number
54
Access Rule
GET/SET
Data Type
BOOL
Group
User I/O Config.
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0