2 alarm codes and trouble shooting, Operation – IAI America PSEP User Manual
Page 76
70
/
3.
Operation
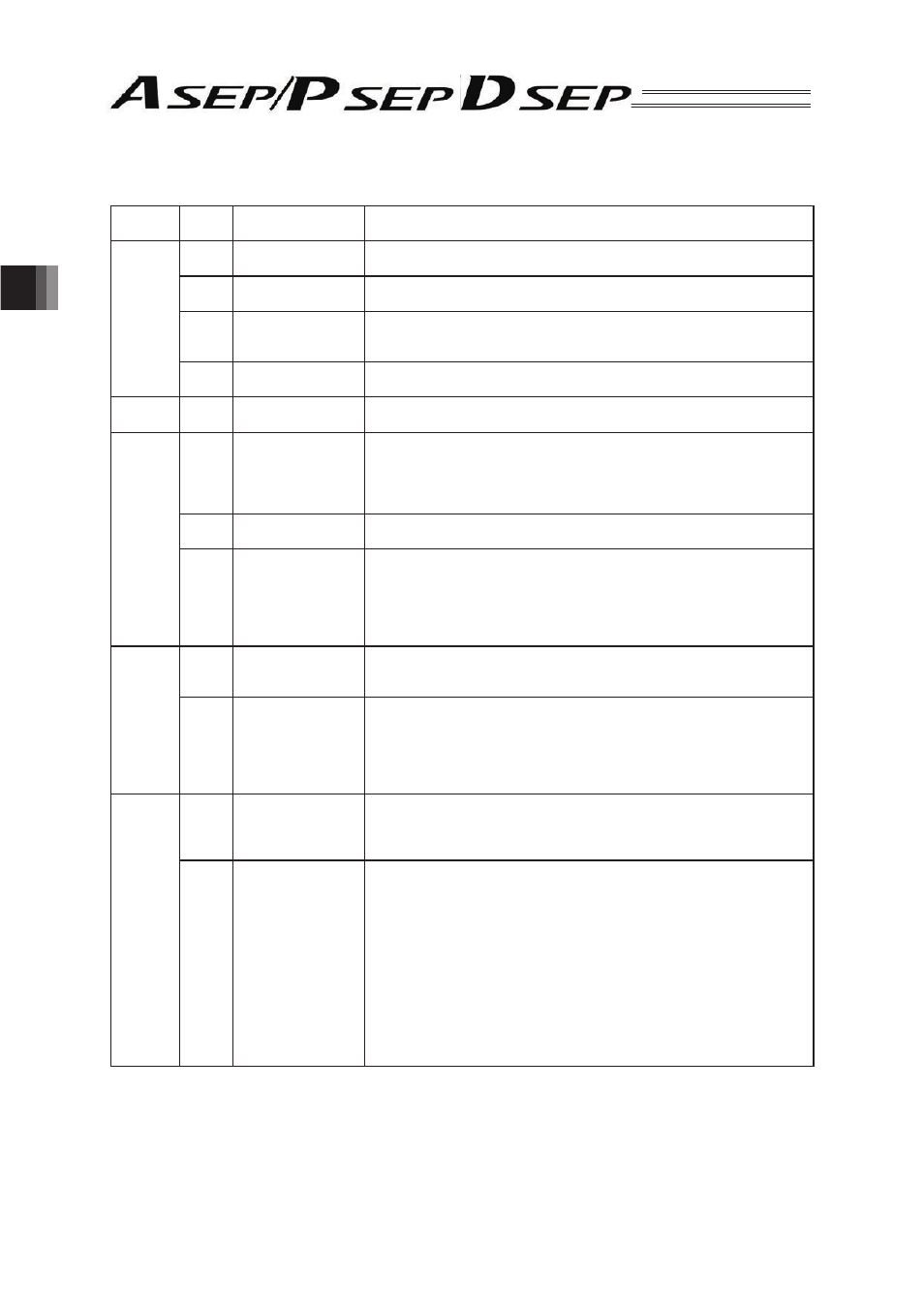
3.6.2 Alarm Codes and Trouble Shooting
Error
Level
Code
Alarm Name
Cause/Treatment
Operation
Cancellation
080
Movement Command in
Servo-Motor OFF
Cause :
The movement command is input while the servo-motor is turned OFF.
Treatment :
Input “SON” signal to turn ON the servo-motor.
082
Movement Command in
Incomplete Home Return
Cause :
The movement command is input while the home return has not been completed.
Treatment :
Input ST0 signal to perform the home return operation.
084
Movement Command
during Home Return
Operation
Cause :
The movement command is input during the home return operation.
7UHDWPHQW ,QSXWWKHFRPPDQGDIWHUFRQ¿UPLQJWKHKRPHUHWXUQFRPSOHWLRQ/6RU3(LV
turned ON).
085
Position Data Error in the
Movement
&DXVH
7KHYDOXHFRUUHVSRQGLQJWRWKHVSHFL¿HGSRVLWLRQLVQRWVHW
Treatment :
Set the effective value in the Position Setting operation.
Cold Start
0A1
Parameter Data Error
Cause :
The data input range in the parameter domain is not correct.
Treatment :
Change the value to the correct one referring to the user parameter table.
Operation
Cancellation
0A2
Position Data Error
Cause :
(1)
The movement command is issued while the target position has not set on the
Position Data.
(2) The target position value set on the Position Data exceeds the soft limit set value.
Treatment :
(1) Set the target position.
(2) Change the target position value to the one within the soft limit set value.
0A3
Position Command Data
Error
Cause :
The velocity value or acceleration value exceeds the maximum set value.
Treatment :
Change the value to the appropriate one.
0A7
Command Deceleration
Error
In the case that the velocity is changed (increased) close to the forward position or backward
position and the acceleration/deceleration has been set lower, the actuator might exceed the
soft limit.
Cause :
The command issue timing for velocity change during the movement, is too late.
Treatment :
Issue the command much earlier so that the actuator does not exceed the soft limit
and an over-chute is not caused.
Cold Start
0A8
Motor · Encoder Type not
Corresponding
Cause :
The type of the motor or encoder set to the parameter is not corresponding to the
system.
Treatment :
Redo the parameter settings.
0B4
Electric Angling
Mismatching
&DXVH
7KHSRVLWLRQGHYLDWLRQFRXQWHULVRYHUÀRZQ
7UHDWPHQW &RQ¿UPDERXWWKHORDGFRQGLWLRQVWKDWWKHZRUNGRHVQRWLQWHUIHUHZLWKDQ\REMHFW
QHDUE\RUWKHEUDNHKDVEHHQUHOHDVHGHWF$OVRWKHFRXQWHURYHUÀRZEHIRUH
the electric angle determination (in the Z-Phase Indetectable condition) can be
considered. In such case, the motor cable broken or encoder wire output error is
supposed, so check the cable connection.
Operation
Cancellation
0B5
Z-Phase Position Error
The position where the Z-phase is detected before the home return operation, is out of the
VSHFL¿HGUDQJH
Cause :
Encoder Error
Treatment :
Contact our company.
0B6
Z-Phase Detection Time
Out
)RUWKLVFRQWUROOHUZKHQWKHVHUYRPRWRULVWXUQHG21IRUWKH¿UVWWLPHDIWHUWKHSRZHULVLQSXW
the magnetic pole phase detection (pole sensing) is performed. At that time, the encoder
=SKDVHVLJQDOLVQRWGHWHFWHGDIWHUWKHVSHFL¿HGWLPHSHULRG
Cause :
(1)
A looseness in the connection section of the actuator connecting cable or wire
breakage is considered.
(2) In the case of the unit with the brake, the brake is not released.
(3) The motor load might be too large due to the external force.
(4) The sliding resistance in the actuator itself might be too large.
Treatment : (1) and (2) Check for the actuator cable wiring condition.
&RQ¿UPWKDWWKHUHLVQRHUURULQWKHPHFKDQLFDOSDUWDVVHPEO\FRQGLWLRQ
(4)
In the case that the load weight is normal, move the actuator by hand to check
the sliding resistance after the power is turned OFF. In the case that there is any
error in the actuator itself, contact our company.