Ap (after absolute position), Trippoint, The motion profiling on the axis is complete – Yaskawa LEGEND-MC User Manual
Page 74
64
LEGEND-MC User’s Manual
AP (After Absolute Position)
[Trippoint]
DESCRIPTION:
The After Position (AP) command is a trippoint used to control the timing of events. This command will
hold up the execution of the following command until one of the following conditions have been met:
1. The commanded motor position crosses the specified absolute position.
2. The motion profiling on the axis is complete.
3. The commanded motion is moving away from the specified position.
The units of the command are quadrature counts. The motion profiler must be active or the trippoint will
automatically be satisfied.
ARGUMENTS: AP x, y, z, w or APX=x or AP a,b, c, d, e, f, g, h where
x, y z, w, or a, b, c, d, e, f, g, h are unsigned integers
USAGE:
RELATED COMMANDS:
EXAMPLES:
NOTE: The accuracy of the AP command is the number of counts that occur in 2 msec. Multiply the speed by 2 msec to
obtain the maximum error. AP tests for absolute position. Use the AD command to measure incremental distances.
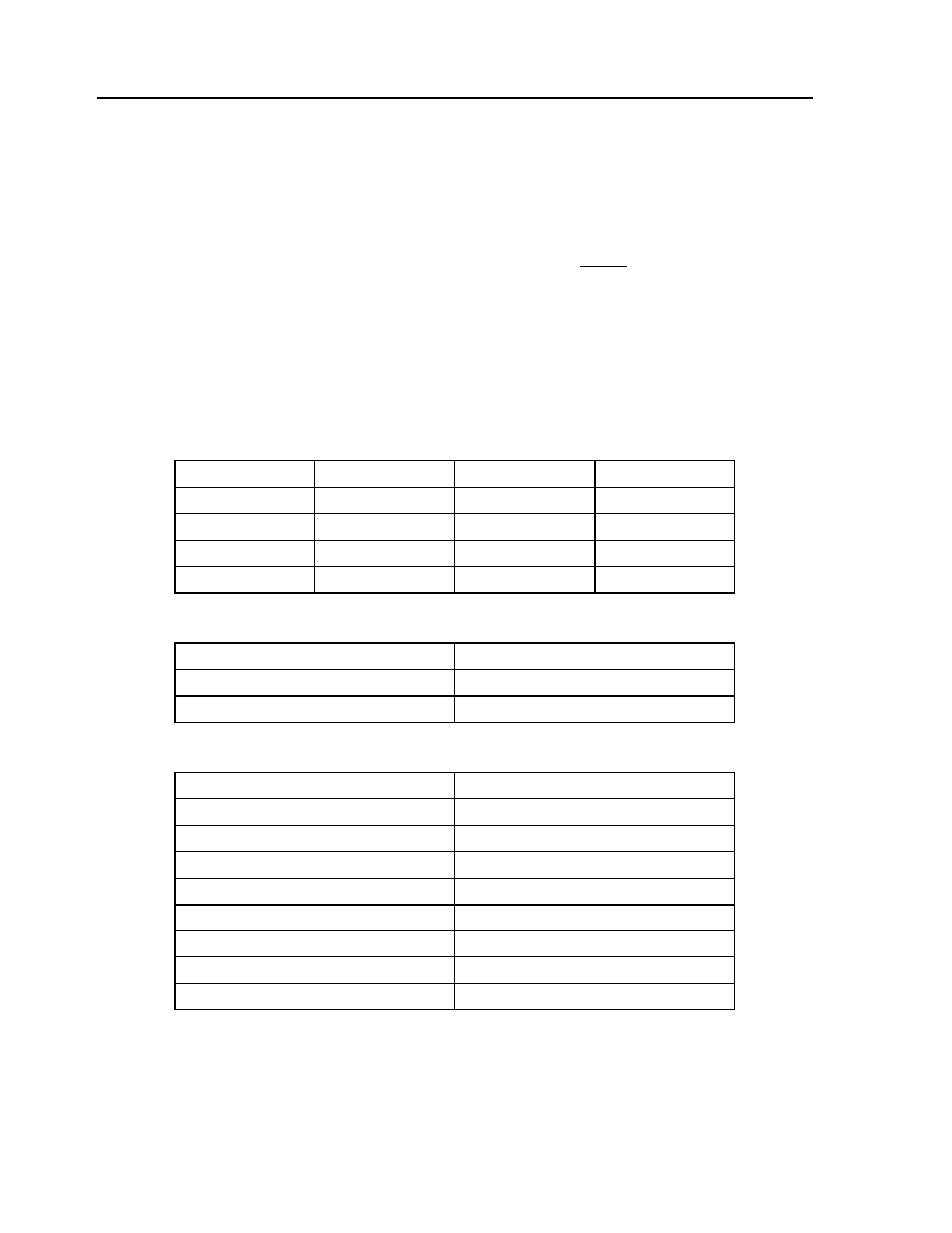
While Moving
Yes
Minimum Value
-2147483648
In a Program
Yes
Maximum Value
2147483647
Command Line
Yes
Default Value
---
Can be Interrogated
No
Default Format
---
Used as an Operand
No
Distributed Control
Specific Axis
"AR"
Trippoint for relative distances
“AD”
After Distance
"MF"
Trippoint for forward motion
#TEST
Program B
DP0
Define position as zero
JG 1000
Set jog with speed of 1000 counts/sec
BG
Begin move
AP 2000
After passing position 2000
V1=_TP
Assign V1 the Xaxis X position
MG "Position is", V1
Print Message
ST
Stop axis
EN
End of Program