Guralp Systems CMG-DCM build <10,000 User Manual
Page 253
Acquisition Modules and Platinum Firmware
Technical operation
Note: this configuration is not recommended as a method of
synchronising a acquisition module (see section 9 on page 120 for a
detailed explanation).
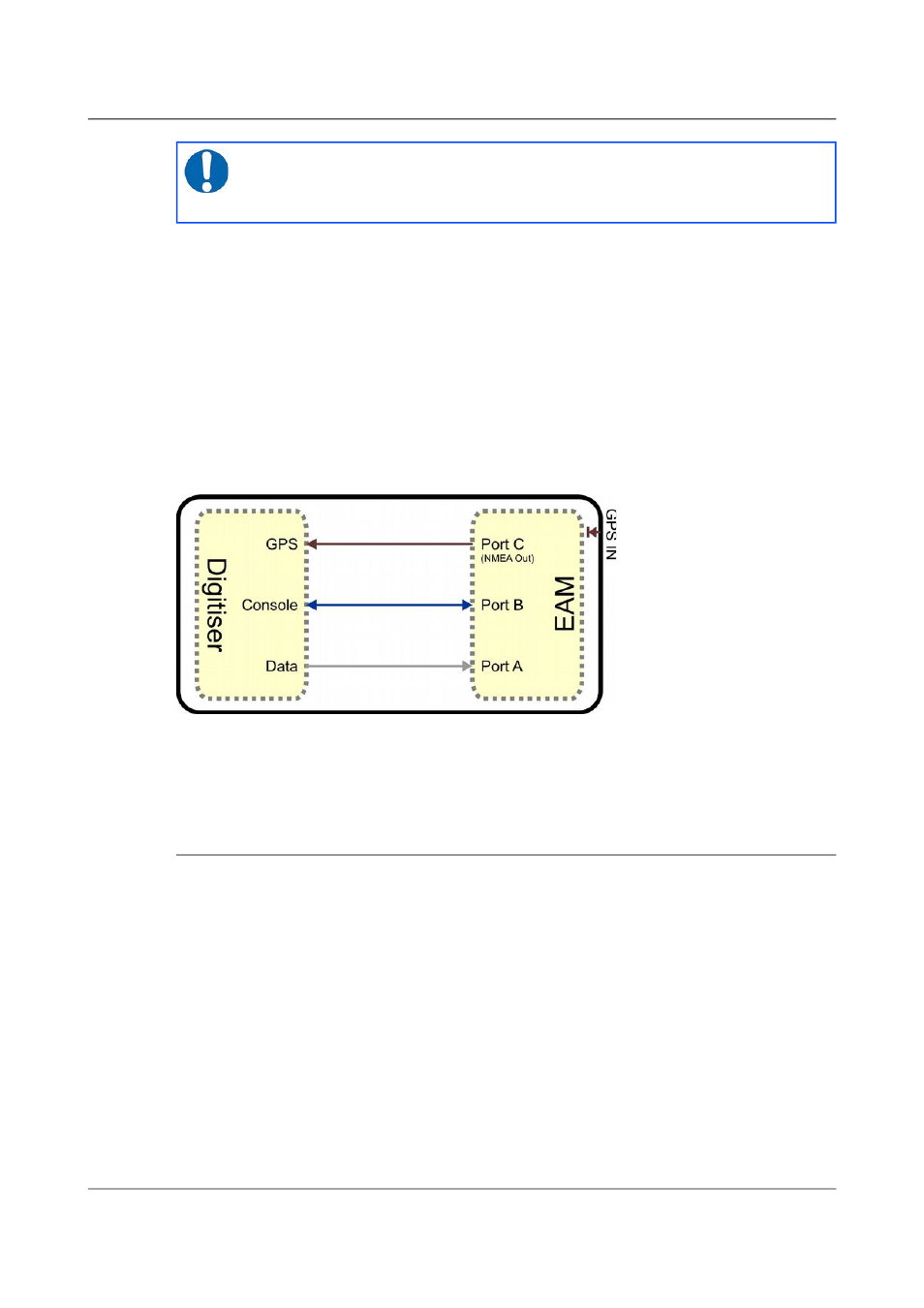
Incoming data from an external GPS receiver is available to both the digitiser
and acquisition modules. Both the digitiser's GPS input and Port C of the
acquisition module must run at 4,800 Baud. This should never be changed.
If an external GPS receiver is available, it should be used to synchronise the
digitiser: the EAM should then be synchronised the digitiser's RTSTATUS
packets. In this case, the service on Port C can be set to “none”.
If use of a GPS receiver is impractical but internet-derived NTP
synchronisation is available, this can be used as the clock source for both the
digitiser module and the acquisition module. By setting the service on Port C
to “NMEA out”, the following connections are enabled:
Both the digitiser's GPS input and Port C of the acquisition module must run
at 4,800 Baud. This should never be changed. Note that, in this mode, the
external GPS socket is disconnected: it cannot be used as an output for
additional digitisers.
15.1.2 Variable Gain Inputs
The cylindrical digitiser is fitted with a programmable gain differential input
amplifier which can be set to ×1, ×2, ×4, ×8, ×16, ×32 or ×64 gain
operation.
The gain can be set individually for each input channel, either using the
Platinum web configuration interface or directly from the digitiser's command
line. In either case, the digitiser module must be re-booted before the new
value will take effect.
The gain settings are reported in the status stream at boot time:
ADC #1 Version 760303
ADC o/s nulls 0 0 0 0
4 channel system
253
Issue E - February 2014