Guralp Systems CMG-DCM build <10,000 User Manual
Page 103
Acquisition Modules and Platinum Firmware
Digitiser Configuration
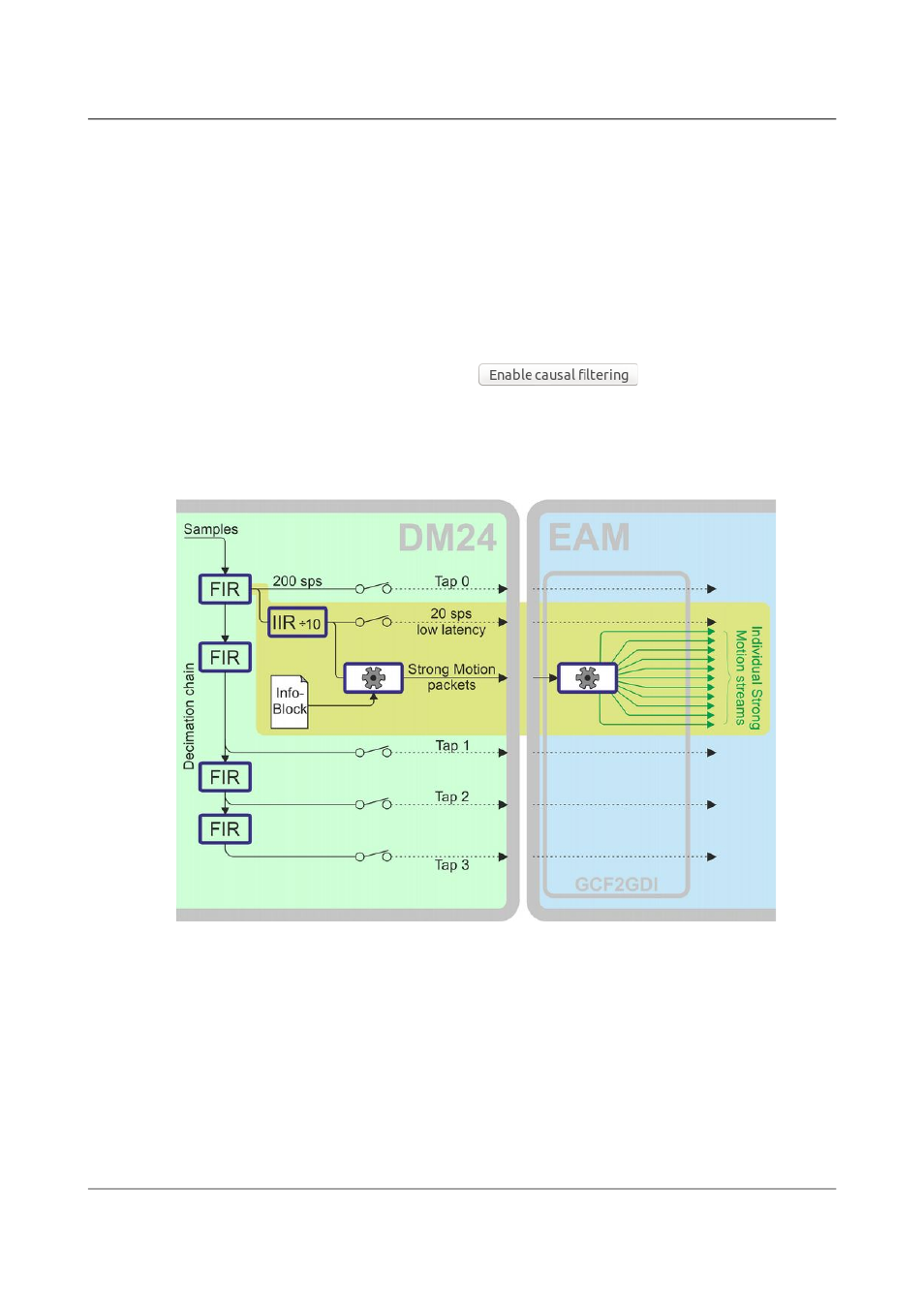
8.1.1.4 Causal filtering (low latency) and Strong motion mode
The next section of the screen controls the filtering mode of the digitiser and
optionally enables strong motion calculations. Causal filtering mode
(previously called “low latency” mode) is intended for use with strong motion
calculations. In this mode, the last stage of the digital filtering is changed
from finite impulse response (FIR, acausal) to infinite impulse response (IIR,
causal) and packets are output each second at twenty samples per second in
order to achieve very near real time data.
These modes cannot be selected unless the first decimator output is set to two
hundred samples per second. The
button is enabled only
when this condition is satisfied.
CMG-DM24 digitisers can operate in “normal” mode or “strong motion” mode.
In strong motion mode, additional “strong motion packets” are generated;
these carry derived and resultant data.
The DM24 uses the calibration information from the InfoBlock (see section
8.1.1.3 on page 102) to compute values such as minima, maxima, averages
and two- and three-dimensional resultants in ground units, all of which are
contained in the strong motion packets. The InfoBlock must be correctly
populated for this to work. The acquisition system demultiplexes the strong
motion packets and generates individual GCF streams for each type of data.
Because GCF streams can only carry integer values, the floating point values
from the strong motion packets are each multiplied by 32767 before being
packed as GCF data.
103
Issue E - February 2014