4 s-curve profile motion, S-curve profile motion – ADLINK PCI-8164 User Manual
Page 87
Operation Theory
75
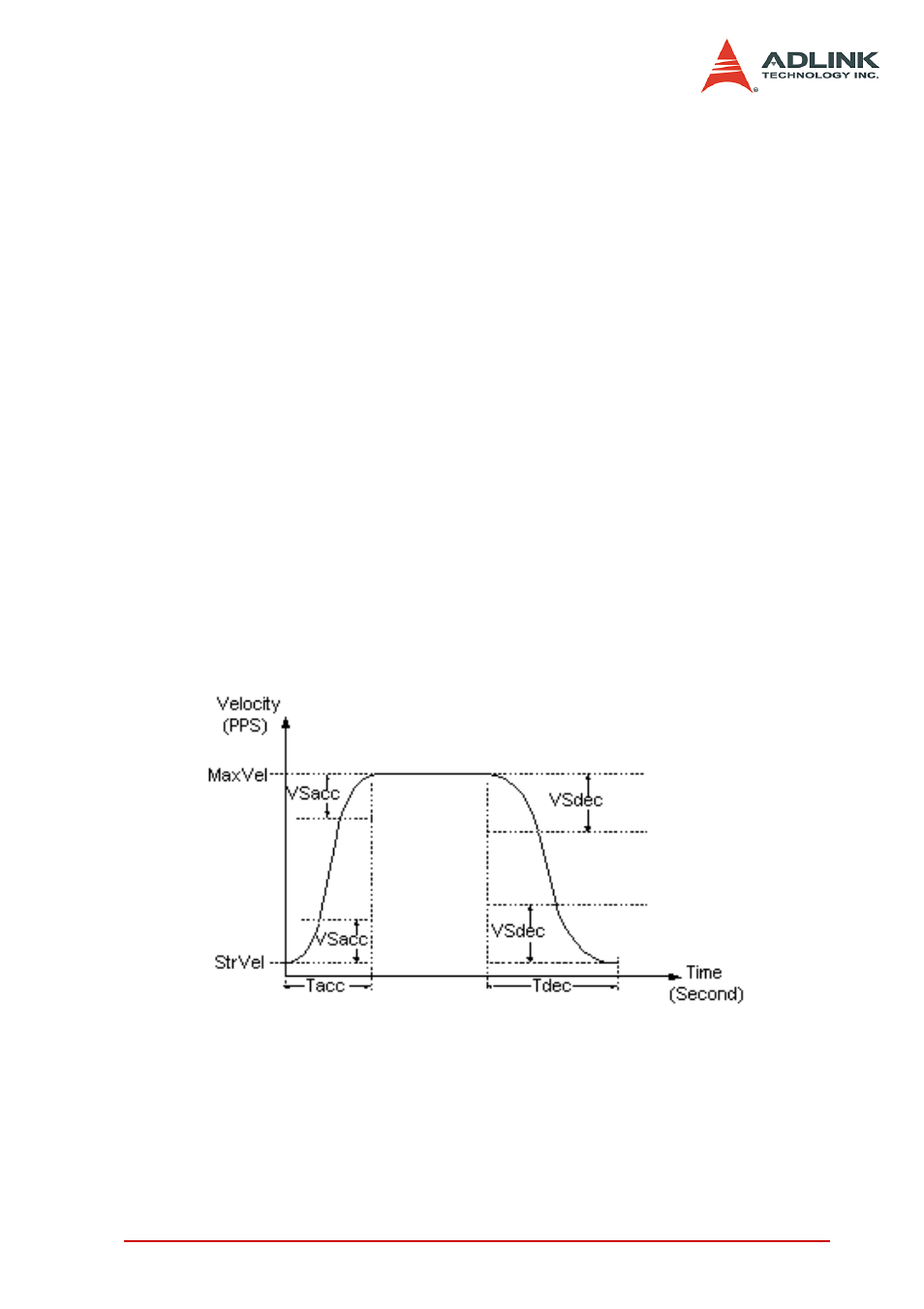
4.1.4 S-curve profile motion
This mode moves a single-axis motor to a specified position (or
distance) with an S-curve velocity profile. S-curve acceleration
profiles are useful for both stepper and servomotors. The smooth
transitions between the start of the acceleration ramp and transi-
tion to constant velocity produce less wear and tear than a trape-
zoidal profile motion. The smoother performance increases the life
of the motor and the mechanics of the system.
There are several parameters that need to be set in order to make
a S-curve move. These include:
Pos:
target position in absolute mode, in units of pulses
Dist:
moving distance in relative mode, in units of pulses
StrVel:
start velocity, in units of PPS
MaxVel: maximum velocity, in units of PPS
Tacc:
time for acceleration (StrVel -> MaxVel), in units of seconds
Tdec:
time for deceleration (MaxVel -> StrVel), in units of seconds
VSacc: S-curve region during acceleration, in units of PPS
VSdec: S-curve region during deceleration, in units of PPS
Normally, the accel/decel period consists of three regions: two
VSacc/VSdec curves and one linear. During VSacc/VSdec, the
jerk (second derivative of velocity) is constant, and during the lin-
ear region, the acceleration (first derivative of velocity) is constant.
In the first constant jerk region during acceleration, the velocity