ADLINK PCI-8164 User Manual
Page 104
92
Operation Theory
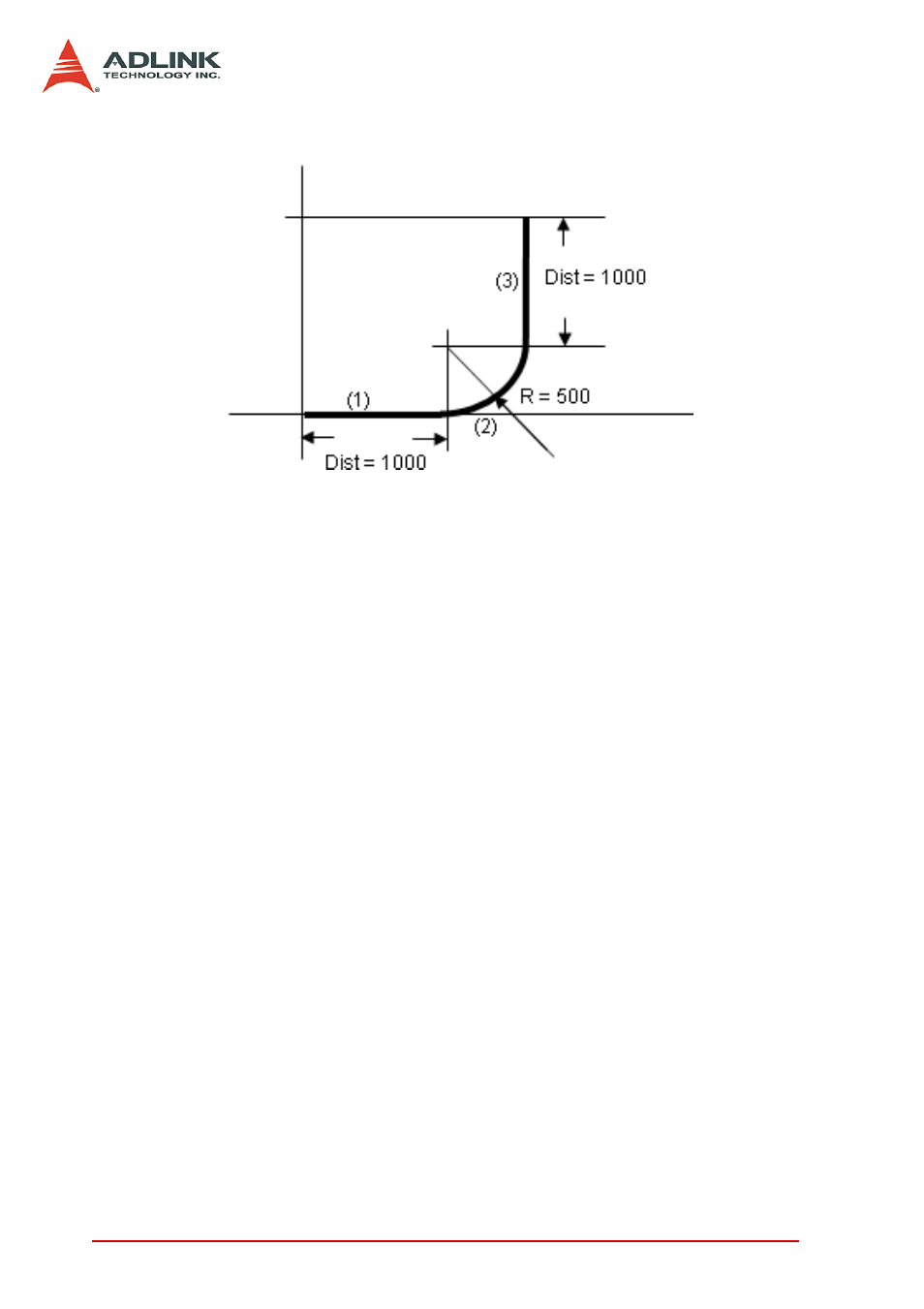
Explanation of example:
When these three motions ARE executed sequentially, the 1st
occupies the Register and is executed immediately; the 2nd occu-
pies Pre-Register1 and waits for completion of the 1st motion. The
3rd occupies Pre-Register2 and waits for completion of the 2nd
motion. Since the 1st motion has a 0 deceleration time and the
2nd motion is an arc of constant velocity, which is the same as the
max_vel of the 1st, the 8164 will output a constant frequency at
intersections between them.
1. Continuous motion between different axes is meaning-
less. Different axes have their own register and pre-reg-
ister system.
2. Continuous motion between different numbers of axes is
not allowed. For example: _8164_start_tr_move()
can not be followed by _8164_start_ta_move_xy()
nor vice versa.
3. It is possible to perform a 3-axis or 4-axis continuous lin-
ear interpolation, but speed continuity is impossible to
achieve.
4. If any absolute mode is used during continuous motion,
make sure that _8164_reset_target_pos() is exe-