Minimizing the velocity error limit setting – Rockwell Automation 2090 Ultra3000 Servo Drives Integration Manual User Manual
Page 144
Publication 2098-IN005C-EN-P — March 2008
144
Minimizing the Effects of Feedback Signal Loss
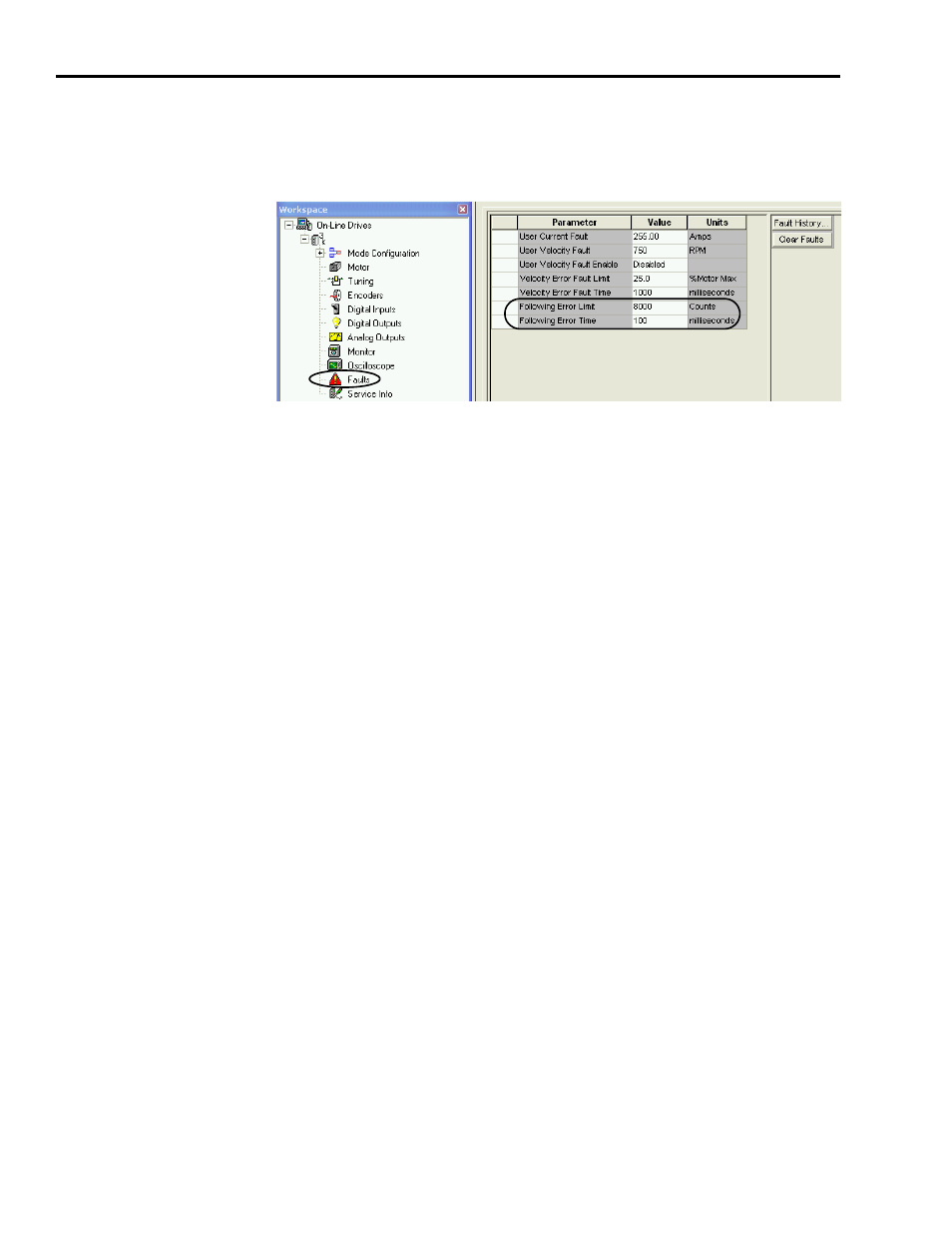
for the Following Error Time parameter is 0…65,535 ms, with a
default value of 100 ms.
Ultraware Following Error Parameters
Setting Velocity Error Limits
in Ultraware Software
The position error limit and time parameters let you define a tight
window of error tolerance for the system. In some instances, however,
the nature of the application requires a large tolerance value, and your
specified window of error tolerance becomes too wide to be effective
in quickly stopping unexpected motion. When this happens, you can
implement additional protection in the Ultra3000 drive safety strategy
by adjusting the velocity error limit setting.
Minimizing the Velocity Error Limit Setting
By minimizing the velocity error limit setting, you can restrict the
amount of velocity error to a safe value before a condition of Excess
Velocity Error (E24) is reached. This means that if an unexpected
motion event related to feedback loss occurs and is not quickly
terminated by the Excess Position Error (E19) response, an Excess
Velocity Error (E24) condition will occur and be used to achieve the
same rapid termination of the unexpected motion. Adjustment of the
velocity error limit setting is readily available in the Ultraware software
only. The RSLogix 5000 software velocity error limit setting is fixed at
25% of the maximum motor speed, with a fixed ride-through time
setting of 1000 ms.
For Ultra3000 drives used with RSLogix 5000 software, the
VelocityError attribute is available to you as a tag in the Controller
Tags branch of the main workspace window, but the
VelocityErrorTime attribute is not. You can incorporate the
VelocityError attribute into your RSLogix 5000 application and
manually configure fault-handling routines that monitor this attribute.
You can also simulate the VelocityErrorTime attribute with an
additional code fragment and incorporate it into your fault-handling