Rockwell Automation 2090 Ultra3000 Servo Drives Integration Manual User Manual
Page 101
Publication 2098-IN005C-EN-P — March 2008
Troubleshooting Your Ultra3000 Servo Drive
101
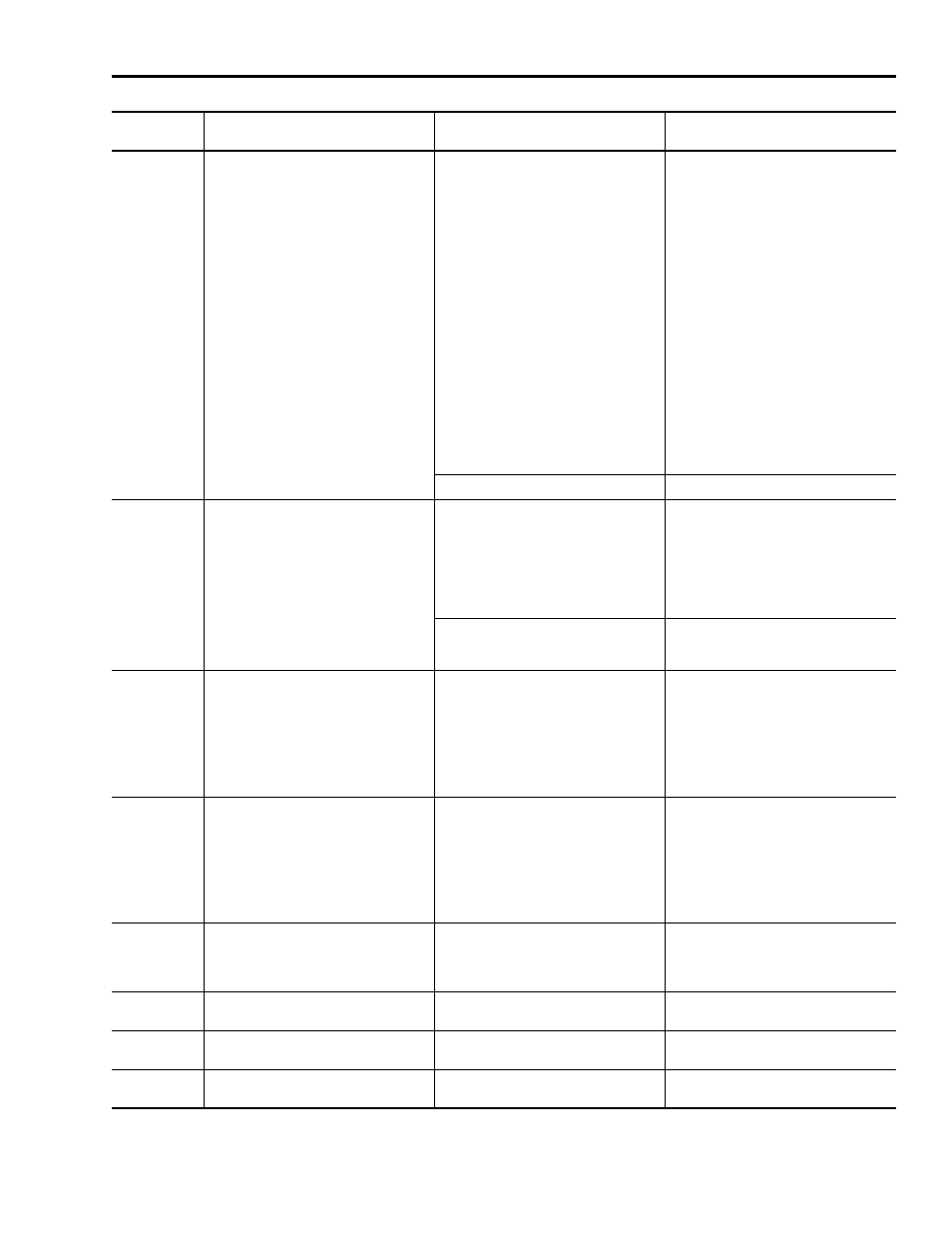
E20
Motor Encoder State Error
The motor encoder encountered an illegal
transition.
•
Replace the motor/encoder.
•
Use shielded cables with twisted pair
wires.
•
Route the feedback away from potential
noise sources.
•
Check the system grounds.
•
Verify that the unbuffered encoder
signals are not subjected to EMI in the
CN1 cable. Remove these signals from
the CN1 cable if they are not being
used.
•
Verify that the motor has a
high-frequency bond to the drive’s
enclosure panel.
•
Verify that any stage connected to the
motor shaft (for example using a ball
screw) has a high-frequency bond to the
machine frame and the drive’s
enclosure panel.
Bad encoder.
Replace motor/encoder.
E21
Auxiliary Encoder state error
The auxiliary encoder encountered an
illegal transition.
•
Use shielded cables with twisted pair
wires.
•
Route the encoder cable away from
potential noise sources.
•
Faulty encoder, replace encoder.
•
Check the ground connections.
Setup time violation for Step/Direction or
CW/CCW input.
Check timing of Step/Direction or CW/
CCW inputs to determine if setup time
requirements are being met.
E22
Motor Thermal Protection Fault
The internal filter protecting the motor
from overheating has tripped.
•
Reduce acceleration rates.
•
Reduce duty cycle (ON/OFF) of
commanded motion.
•
Increase time permitted for motion.
•
Use larger Ultra3000 and motor.
•
Check tuning.
E23
IPM Thermal Protection Fault
The internal filter protecting the drive from
over heating has tripped.
•
Reduce acceleration rates.
•
Reduce duty cycle (ON/OFF) of
commanded motion.
•
Increase time permitted for motion.
•
Use larger Ultra3000 and motor.
•
Check tuning.
E24
Excess Velocity Error
Velocity error limit was exceeded.
•
Increase time or size of allowable error.
•
Reduce acceleration.
•
Check tuning.
E25
Sensor Not Assigned
Homing or registration motion was
attempted without a sensor assigned.
Assign a sensor to a digital input.
E26
User-specified Velocity Fault
User-specified velocity level was
exceeded.
Increase to a less restrictive setting.
E27
Axis Not Homed
Absolute positioning was attempted
without homing.
Verify homing sequence.
Error
Code
Problem or Symptom
Possible Cause
Action/Solution