Drive 4 control routine – Rockwell Automation 25-COMM-E2P PowerFlex 25-COMM-E2P Dual-Port EtherNet/IP Adapter User Manual
Page 110
110
Rockwell Automation Publication 520COM-UM003A-EN-E - June 2013
Chapter 7
Using Multi-Drive Mode
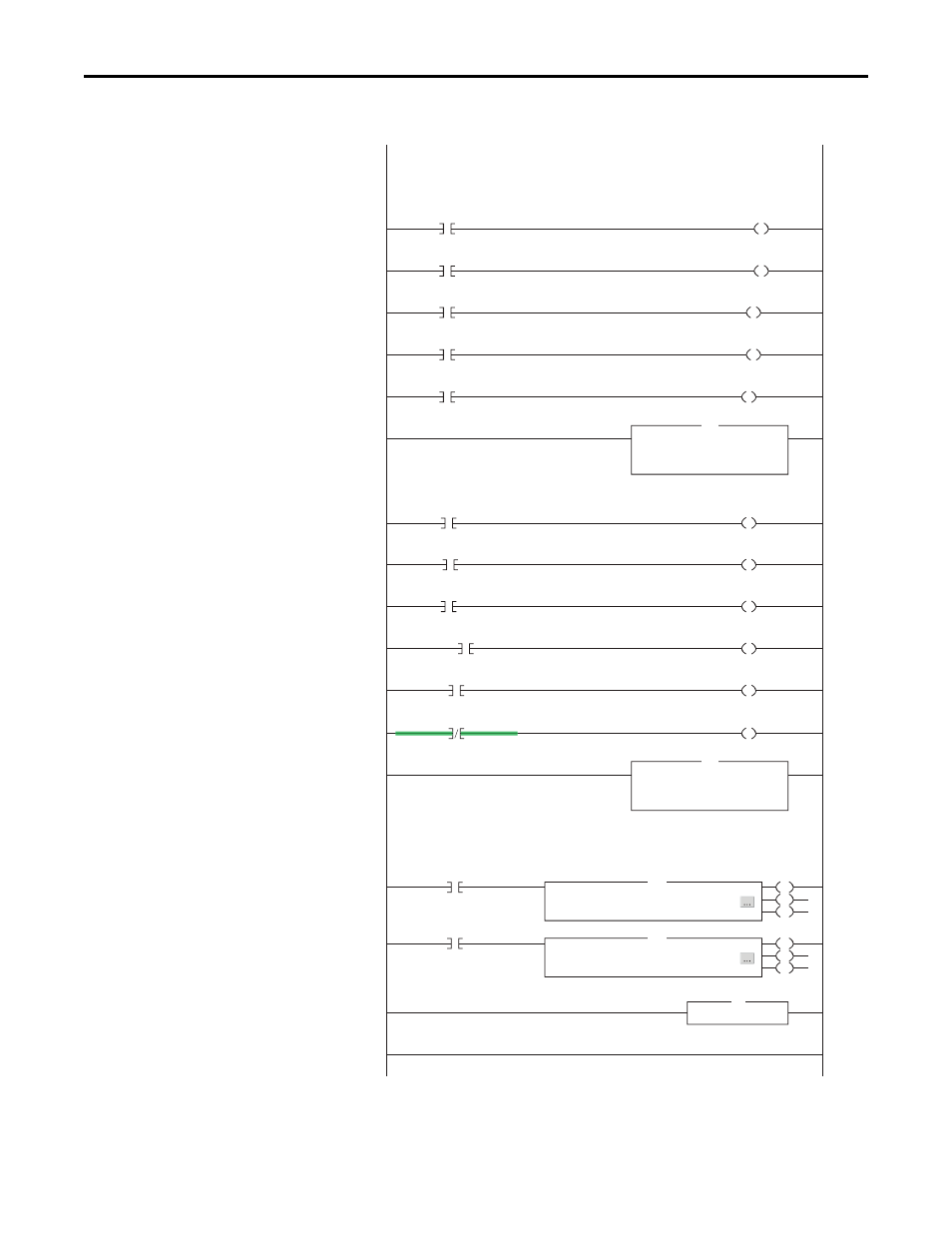
Drive 4 Control Routine
0
5
(End)
Copy File
Source
Dest
Length
Drive_Input_Image[11]
Drive_4_Feedback
1
COP
12
Copy File
Source
Dest
Length
Drive_4_Reference
Drive_Output_Image[9]
1
COP
15
Return from Subroutine
RET
Drive_Input_Image[10].0
Drive_4_Status_Ready
This section takes the data from the input area and moves it to specific tags (Logic Status bits and Feedback) for use
elsewhere in the ladder program.
This section takes the data from specific tags (Logic Command bits and Reference) and moves them to the output
image area for transmission to the scanner.
Drive 4 parameters are accessed by adding 21504 decimal (5400 hex) to the desired parameter number. For example,
to access parameter P109 an Instance of 21613 (21504 + 109) is used.
1
Drive_Input_Image[10].1
Drive_4_Status_Active
2
Drive_Input_Image[10].3
Drive_4_Status_Forward
3
Drive_Input_Image[10].7
Drive_4_Status_Faulted
4
Drive_Input_Image[10].8
Drive_4_Status_At_Reference
6
Drive_4_Command_Stop
Drive_Output_Image[8].0
7
Drive_4_Command_Start
Drive_Output_Image[8].1
8
Drive_4_Command_Jog
Drive_Output_Image[8].2
9
Drive_4_Command_Clear_Faults
Drive_Output_Image[8].3
10
Drive_4_Command_Forward
Drive_Output_Image[8].4
13
Perform_Parameter_Read_4
EN
DN
ER
11
Drive_4_Command_Forward
Drive_Output_Image[8].5
Message
Message Control Parameter_RD_Message_4
MSG
14
Perform_Parameter_Write_4
EN
DN
ER
Message
Message Control Parameter_WR_Message_4
MSG
Explicit Messaging Example
Drive 4 Control Subroutine