12 restarting the can bus, Restarting the can bus – Lenze CANopen Controller-based Automation User Manual
Page 94
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
94
12
Restarting the CAN bus
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
12
Restarting the CAN bus
During operation, the CAN bus may have to be restarted. This is e.g. required after serious
disturbances such as a cable break.
How to restart the CAN bus:
1. Activate the controller inhibit for the drive controllers.
2. Call the NMT function block (see below) from the CAA_CiA405.lib function library.
When an error has occurred, set RESET_COMMUNICATION and then
START_REMOTE_NODE separately for each CANopen node.
The following steps are only required for Motion devices:
3. Call the SMC3_ReInitDrive function block from the SM3_Basic.lib function library.
4. Call the MC_Reset function block from the SM3_Basic.lib function library.
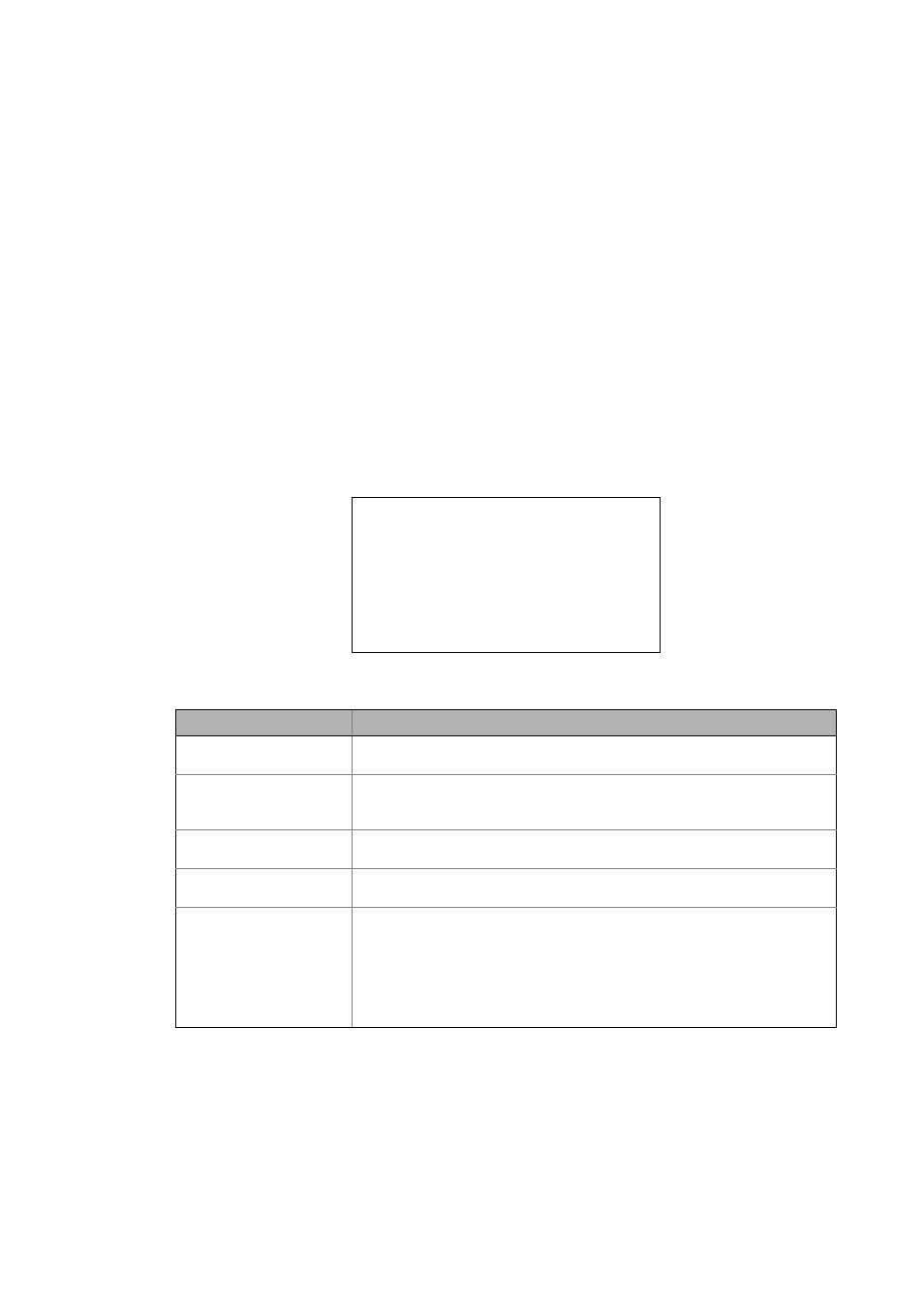
Inputs of the function block "NMT"
NMT
USINT NETWORK
Confirm BOOL
BOOL ENABLE
Error CANOPEN_KERNEL_ERROR
UDINT TIMEOUT
Device Device
TRANSITION_STATE State
Identifier/data type
Meaning/possible settings
NETWORK
USINT
CAN interface number: "1" or "2"
ENABLE
BOOL
Function block enable
• TRUE: Function block is enabled.
• FALSE: Function block is not enabled.
TIMEOUT
UDINT
Maximum execution time of function block in [ms]
• The initial value "0" means that the monitoring is deactivated.
Device
Device
CAN node number of slave
STATE
TRANSITION_STATE
NMT status of slave:
• STOP_REMOTE_NODE (16#04)
• START_REMOTE_NODE (16#05)
• RESET_NODE (16#06)
• RESET_COMMUNICATION (16#07)
• ENTER_PRE_OPERATIONAL (16#7F)
• ALL_EXCEPT_NMT_AND_SENDER (16#800)