9 parallel operation of two synchronised can buses, Parallel operation of two synchronised can buses, Supplemented – Lenze CANopen Controller-based Automation User Manual
Page 82: 9commissioning of the canopen motion bus
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
82
9
Commissioning of the CANopen Motion bus
9.9
Parallel operation of two synchronised CAN buses
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.9
Parallel operation of two synchronised CAN buses
The MC-CAN2 communication card is provided with two CAN interfaces. Thus, basically two CAN
buses can be operated independently of each other. The two buses can also be operated in a sync-
controlled manner.
In the basic setting, which is sufficient for most application cases, there is an interval of the sync
telegrams of approx. 50 μs on the two buses.
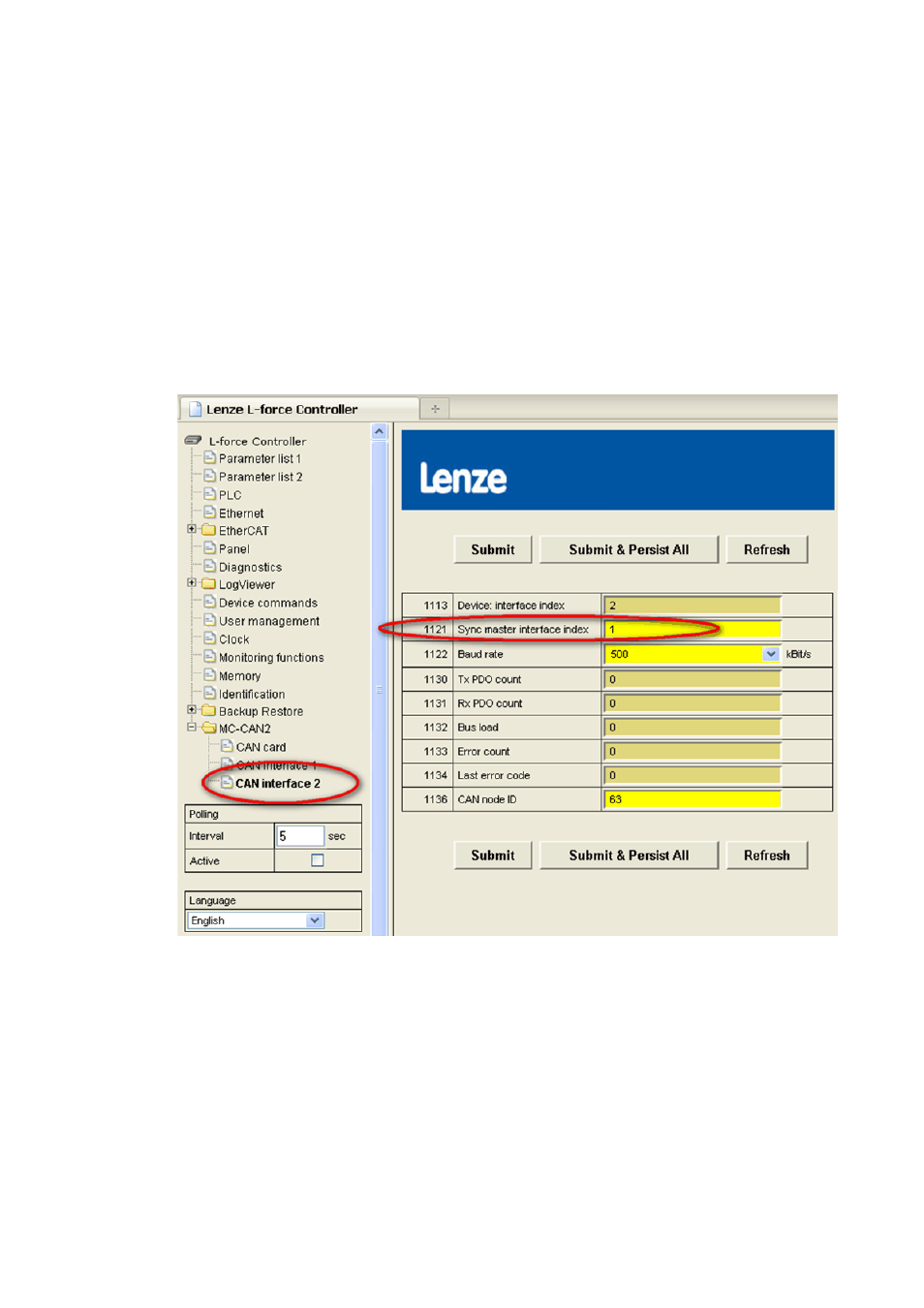
If special cases require a different setting, the following optimisation can be carried out via the
»WebConfig« (see software manual for the Lenze Controller):
• Set the parameter "Sync master interface index" = 1 for "CAN interface 2".
• This reduces the interval of the sync telegrams on the two buses to approx. 20 μs.