1 canopen (logic) / canopen (motion), Canopen (logic) / canopen (motion), 4system bus (can) / canopen – Lenze CANopen Controller-based Automation User Manual
Page 16
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
16
4
System bus (CAN) / CANopen
4.1
CANopen (Logic) / CANopen (Motion)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
4.1
CANopen (Logic) / CANopen (Motion)
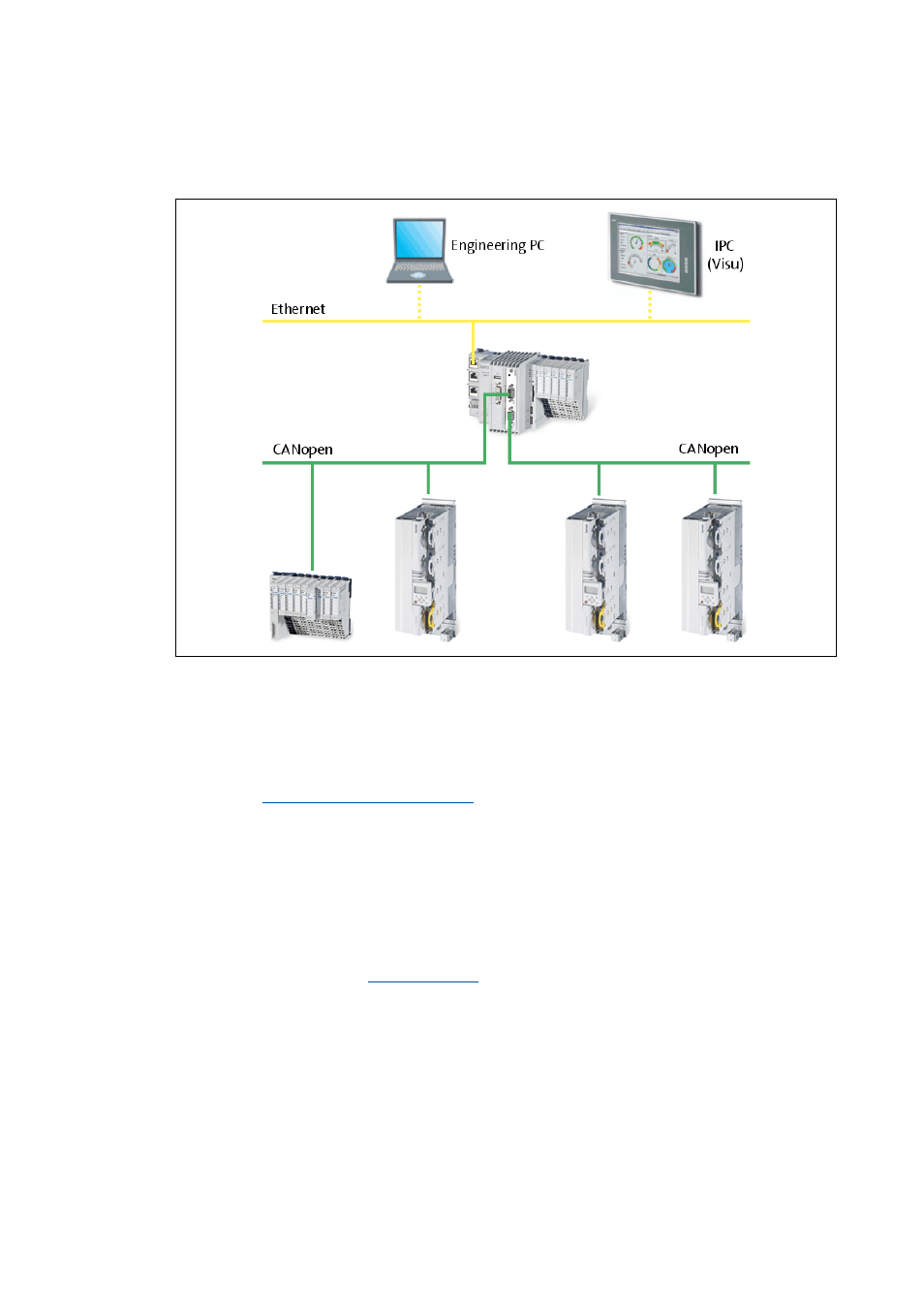
[4-1]
Example: CANopen (Logic/Motion) with the 3231 C controller (I/O system 1000 and Servo Drive 9400 as slaves)
Due to the requirements regarding the real time behaviour of the fieldbus system and due to its
limited transfer capacity, it is useful to operate Logic and Motion devices on separate CAN phases if
CANopen is used – on a logic bus and a motion bus.
The Lenze Controllers ...
• with the
have two CAN interfaces for CANopen (Logic)
and CANopen (Motion);
• can also be used as CAN slaves.
Depending on the required number of Motion nodes and bus cycle time, up to 2 Motion bus lines
can be created.
Tip!
A sample project for operation of a 3200 C controller as CAN slave can be found in the
"Download" area at
:
"Application Knowledge Base": All articles Application Ideas Pool Controller 3200 C