10 mixed operation of canopen and ethercat, Mixed operation of canopen and ethercat, Added – Lenze CANopen Controller-based Automation User Manual
Page 92
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
92
10
Mixed operation of CANopen and EtherCAT
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
10
Mixed operation of CANopen and EtherCAT
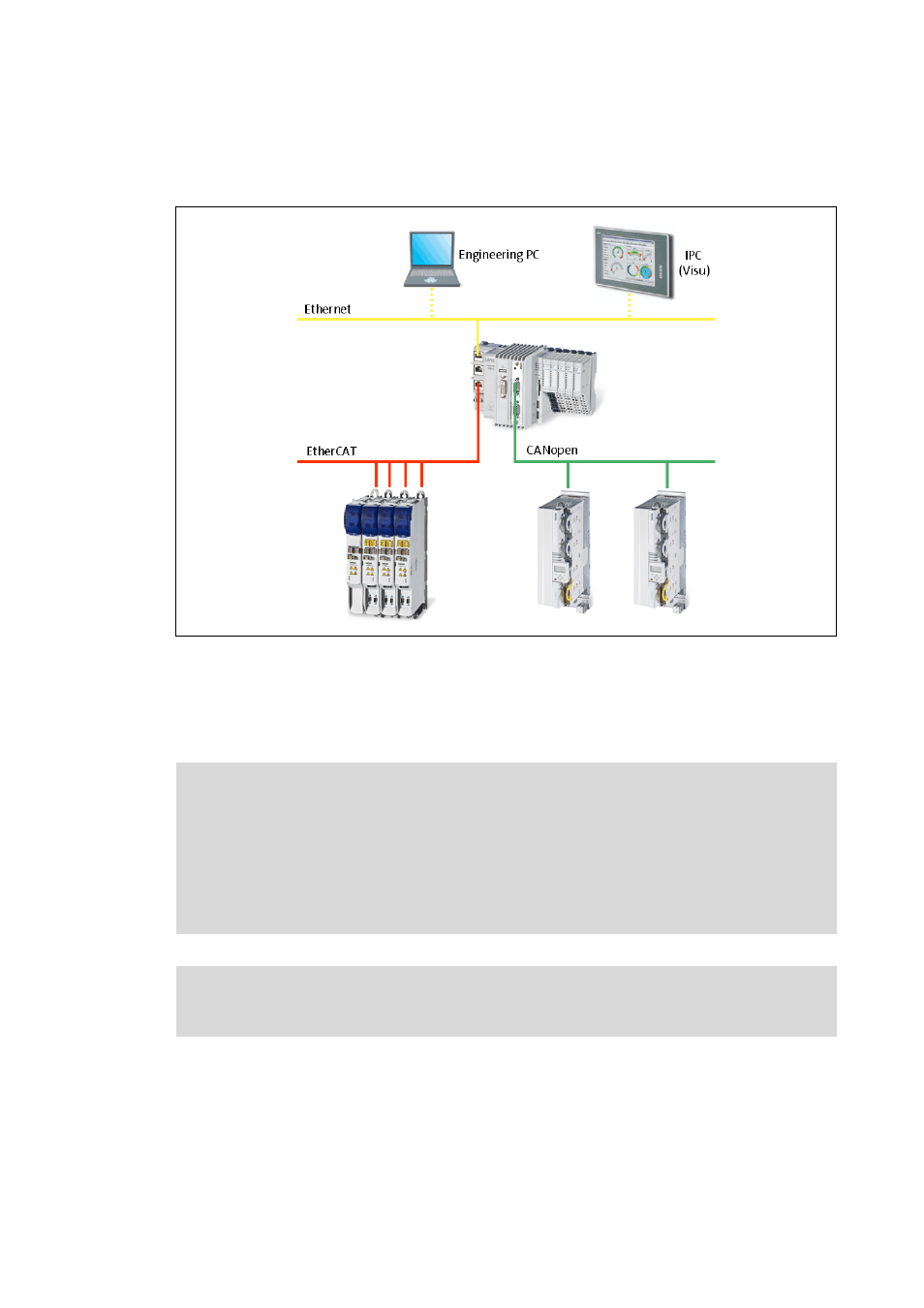
[10-1] Example: Mixed operation of EtherCAT with CANopen connected to a 3231 C controller with Servo-Inverter i700 and Servo
Drives 9400
Within the Lenze Controller-based Automation, CANopen can be used in parallel to the EtherCAT
bus system. This is useful if not all field devices are available for the same bus system or if, in parallel
to the CANopen bus as Logic bus, a Motion bus (EtherCAT) is required.
Note!
• Due to the requirements regarding the real time behaviour of the fieldbus system and
due to its limited transfer capacity, it is useful to operate Logic and Motion devices on
separate field bus lines if CANopen is used – on a logic bus and a motion bus.
• In mixed operation, ensure that the CAN Motion task has the highest priority. The task
assigned to the EtherCAT bus should have the second-highest priority. The tasks
assigned to the Logic bus systems should be configured with a lower priority.
Controller-based Automation EtherCAT communication manual
Here you can find information on the commissioning of EtherCAT components.