10 setting softmotion parameters, Setting softmotion parameters ( 84), 9commissioning of the canopen motion bus – Lenze CANopen Controller-based Automation User Manual
Page 84
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
84
9
Commissioning of the CANopen Motion bus
9.10
Setting SoftMotion parameters
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
9.10
Setting SoftMotion parameters
For the Servo Drive 9400 Highline CiA 402 the following parameters must be set manually via the
»Engineer«:
• Homing mode (C02640, set in application-dependent manner)
• Touch probe interface (set in application-dependent manner)
• Control of the holding brake (0x60FB/2 | Brake control)
Depending on the setting of this parameter, the holding brake is applied for a short time after
the conclusion of the home position path. In order to avoid this, set bit 2 in this parameter
("disable stop": does not apply the brake at standstill).
These parameters are not set via the Lenze Controller.
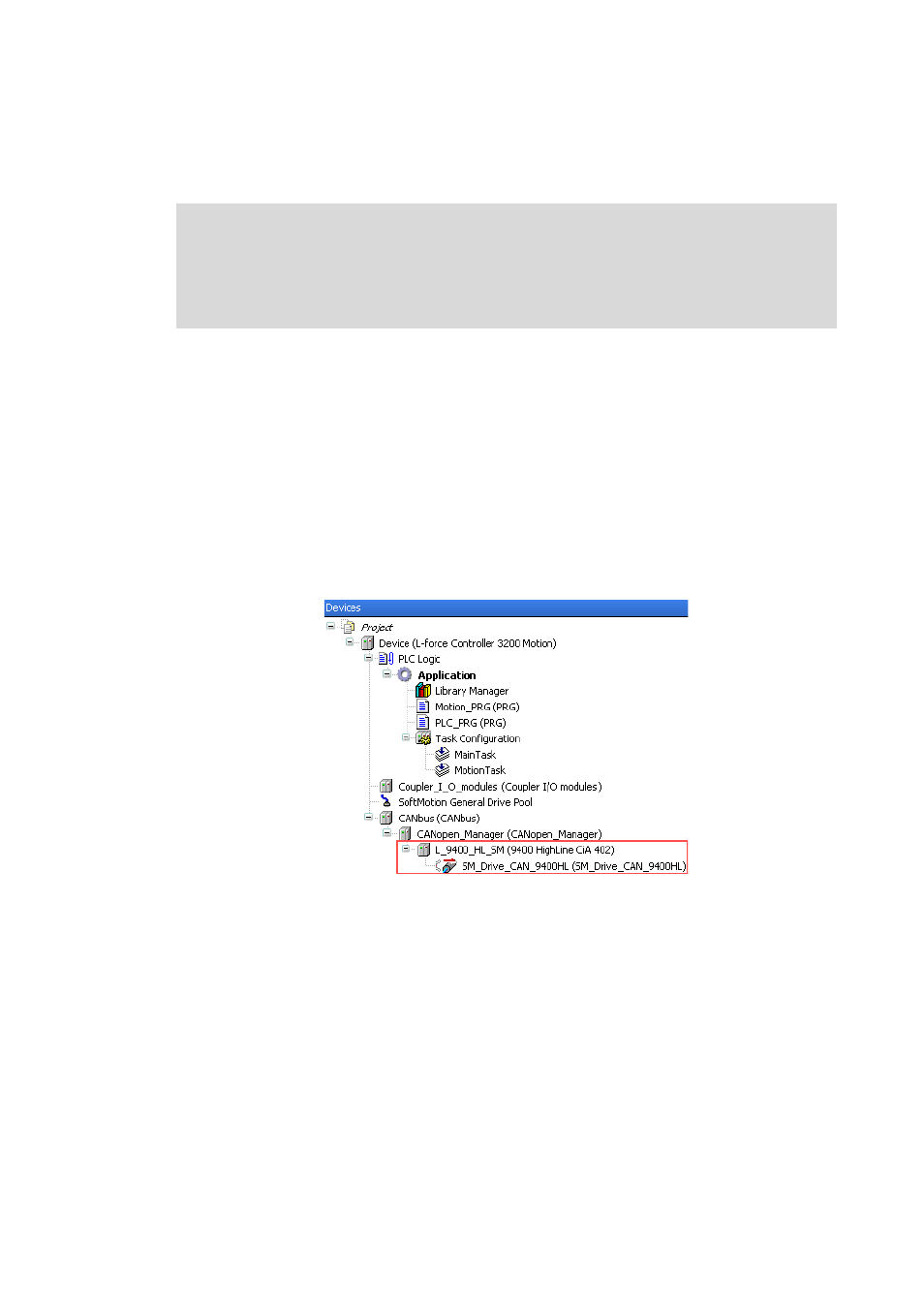
Example of a minimum configuration with a Motion device (Servo Drive 9400 HighLine CiA 402)
Note!
In the »PLC Designer«, the SoftMotion tabs are only available for field devices using a
Motion application (e.g. Servo Drive 9400 Highline CiA 402).
The SoftMotion parameters are to be set in relation to the application.