7preparing the field devices – Lenze CANopen Controller-based Automation User Manual
Page 34
Lenze · Controller-based Automation · CANopen® Communication Manual · DMS 6.3 EN · 04/2014 · TD17
34
7
Preparing the field devices
7.3
Connecting the Engineering PC to the Lenze Controller
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
7.3
Connecting the Engineering PC to the Lenze Controller
To commission the field devices, an online connection is required between the Engineering PC and
the field device. To establish an online connection between an Engineering PC and a field device (like
a controller), two ways are possible:
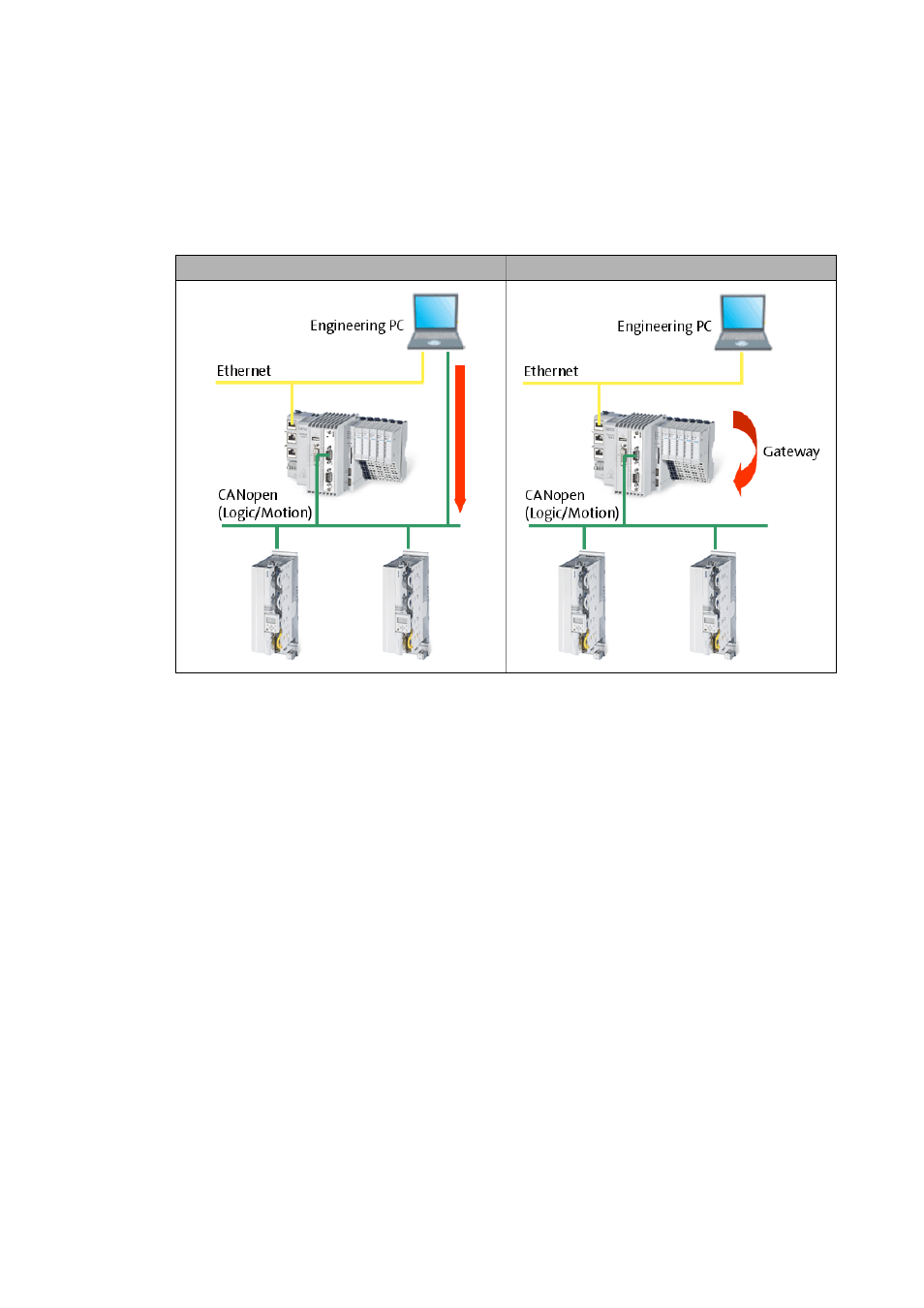
[7-1]
Online connection between the Engineering PC and the field device
If the Lenze Controller has not been commissioned yet, directly connect the Engineering PC to the
CANopen bus to commission the field devices. To activate the Engineering PC, for example use the
USB system bus adapter (EMF2177IB). Then the download times are optimal and is it not necessary
to commission the controller first.
As soon as the Lenze Controller has been commissioned, no direct coupling should be used anymore
since it may disturb the real-time capability of the fieldbus. This especially applies to the CANopen
Motion bus. Here, the transmission of the sync telegram on time can be disturbed so that an
increased jitter on the fieldbus may be the result.
Moreover, each field device requires a second parameter data channel for independent bus access
by two masters (controllers). For some device types, the parameter data channel must be installed
separately, e.g. in the case of the Servo Drives 9400.
As an option, some controllers can operate two independent CAN interfaces. In this case, one
interface can be used for the connection with the Lenze Controller, the other for the direct
connection of the Engineering PC. Thus, two fieldbuses are created which are physically
independent. In this case, the real-time capability of the nodes on the Motion bus is not influenced
even with direct coupling. However, the wiring expense increases.
Direct coupling
Lenze Controller as gateway