3 current characteristics, Technical data, Current characteristics – Lenze 8400 User Manual
Page 67: 5 hz
Technical data
Current characteristics
4
67
EDS84ASC552 EN 9.1
4.3
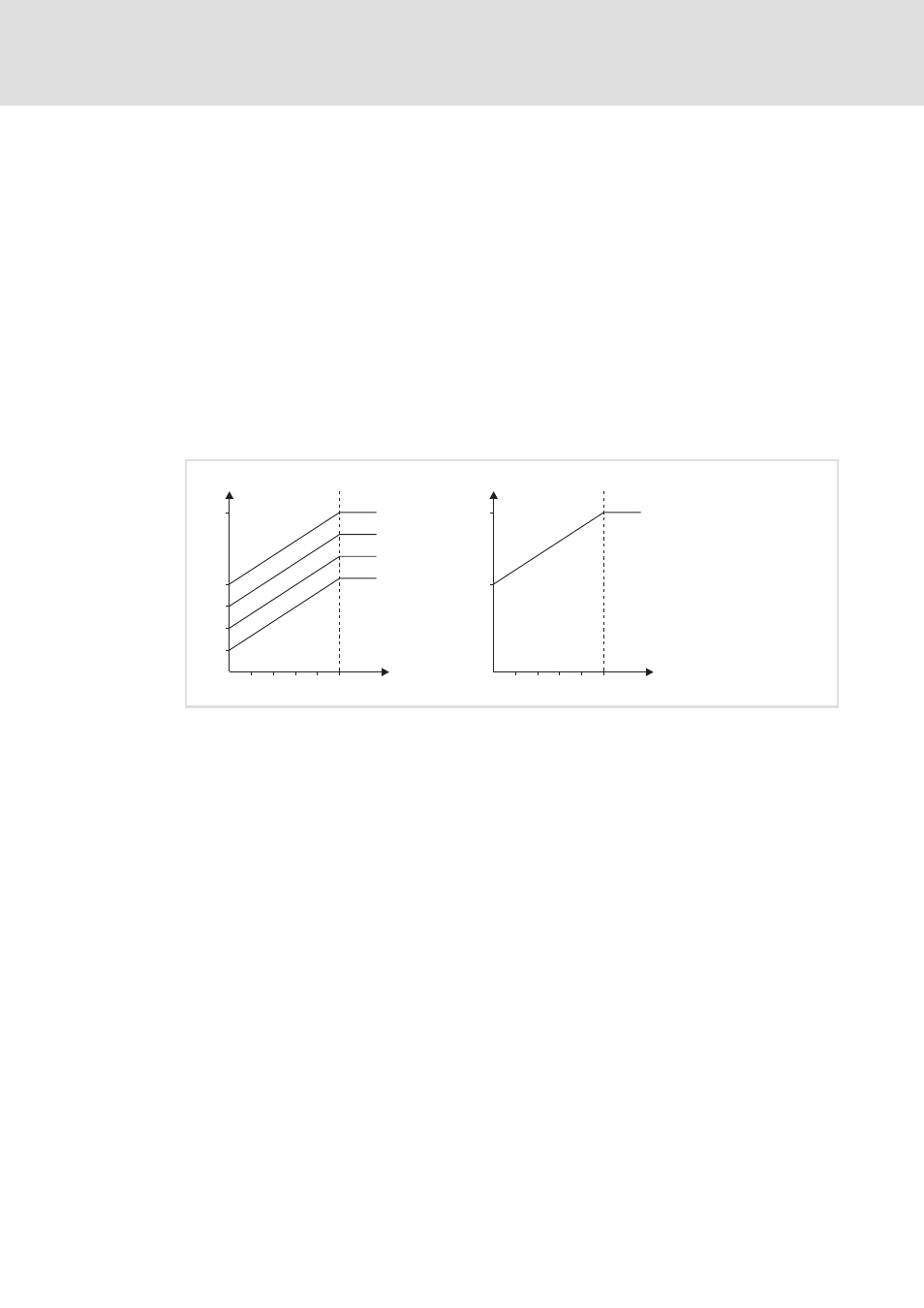
Current characteristics
The controller limits its maximally possible motor current under the following operating
conditions (”current derating”):
ƒ
If the maximum heatsink temperature is exceeded
– In this case, the controller switches independently from switching frequency mode
of 16 kHz to 8 kHz and from 8 kHz to 4 kHz (but not from 4 kHz to 2 kHz). This
function can be deactivated via C00144.
When the heatsink temperature continues to rise, the inverter output will be
inhibited and the error message ”Trip” occurs. This also occurs when the switching
frequency reduction is deactivated.
ƒ
In case of output frequencies f
out
< |5 Hz|
ƒ
As a function of the switching frequency modes ”fixed” or ”variable”
0
0
5
5
f
[Hz]
out
f
[Hz]
out
0
1
I
OUT
I
OUT
I
aM
I
aM
I
aM02
I
aM04
I
aM08
I
aM016
I
aM0v
I
aM2
I
aM4
I
aM8
I
aM16
I
aMv
8400GG084
Fig. 4-1
Current derating characteristics
Derating curve depending on the fixed switching frequency
Derating curve depending on the variable switching frequency
I
out
Output current
I
aM
Maximum output current (overload current)
I
aMx
Maximum output current (overload current) at different switching frequencies: 2kHz,
4kHz, 8kHz and 16kHz
I
aM0x
Maximum output current (overload current) at f
out
= 0Hz and different switching
frequencies: 2kHz, 4kHz, 8kHz, 16kHz
I
aMv
Maximum output current (overload current) at a variable switching frequency
I
aM0v
Maximum output current (overload current) at f
out
= 0Hz and a variable switching
frequency
f
out
Field frequency at the output U, V, W