Nanodac – Carbolite nanodac User Manual
Page 94
nanodac™
MC27 –EN– 1.04
92
AUTOTUNE (Cont.)
EXAMPLE 2: AUTOTUNE FROM BELOW SP (HEAT ONLY)
The sequence of operation for a heat only loop is the same as that described above for a heat/cool loop,
except that the sequence ends at ‘F’ since there is no need to calculate ‘R2G’ (R2G is set to 1.0 for heat
only processes). At ‘F’ autotune is turned off and the process is allowed to control using the new control
terms.
For a tune from below setpoint ‘CBL’ is calculated on the basis of the size of the overshoot (assuming it
was not set to Auto in the initial conditions). CBH is then set to the same value as CBL.
Note: Autotune can also occur when the initial PV is above SP. The sequence is the same as
tuning from below setpoint except that the sequence starts with natural cooling applied at ‘B’ after
the first one minute settling time. In this case CBH is calculated and CBL is then set to the same
value as CBH.
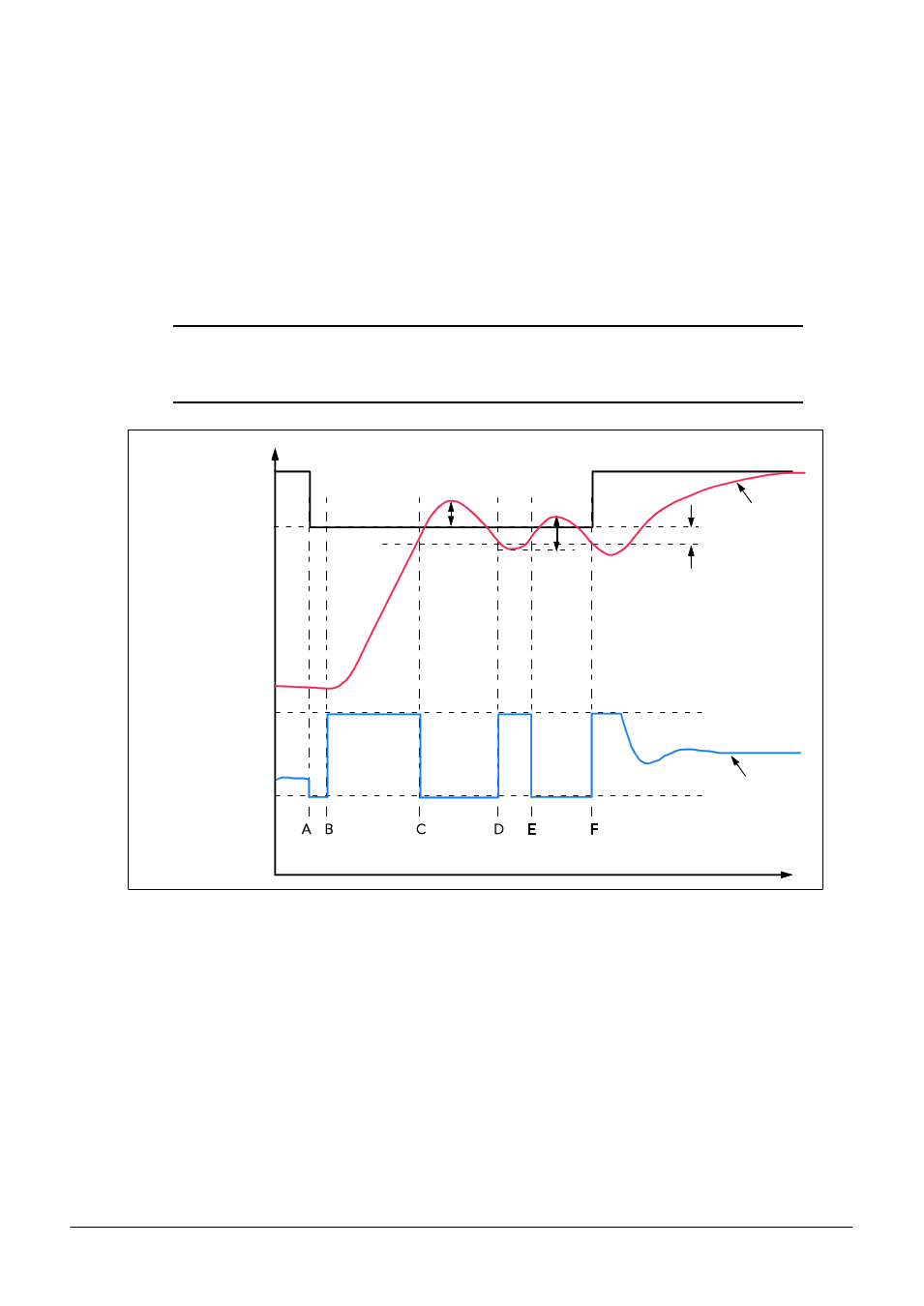
Figure 6.4.5b Autotune heat only process (from below SP)
A
Start of Autotune
A to B
Heating off for one minute to allow steady state conditions to be established.
B to D
First heat cycle to establish first overshoot. Cutback low (CBL) value calculated
from the overshoot magnitude (unless CBL set to ‘Auto’).
D to F
Calculate PID terms.
F
Autotune is turned off and the process is allowed to control at the target setpoint
using the new control terms.
Target SP
True control point
High output
Low output
First
overshoot
Peak to
Peak
PV
Hysteresis
OP
B – A = 1 minute