IAI America ERC User Manual
Page 52
32
Home return completion (HEND)
This signal is OFF immediately after the power is input, and turns ON in either of the following two conditions:
[1] Home return operation has completed with respect to the first movement command issued with the start
signal.
[2] Home return operation has completed following an input of the home return signal.
Once turned ON, this signal will not turn OFF until the input power is cut off or the home return signal is input
again.
The HEND signal can be used for the following purposes:
[1] Check prior to establishing the home if movement toward the home direction is permitted, in cases where an
obstacle is located in the direction of the home
[2] Use as a condition for enabling the zone output signal
Zone (ZONE)
Use a ZONE signal as a limit switch at an intermediate point or as a simple ruler.
This signal will turn ON when the current position is inside the range specified by parameter Nos. 1 and 2, and
turn OFF if the current position is outside this range.
(Note)
The ZONE signal is enabled after the coordinate system is established following a completion of home
return. It will not be output simply by turning on the power.
As long as home return has completed, the ZONE signal remains enabled while the motor drive power
is cut off.
Alarm (*ALM)
This signal remains ON while the controller is operating properly, and turns OFF when an alarm has generated.
Provide an appropriate safety measure for the entire system by allowing the PLC to monitor the OFF status of
this signal.
For details of alarms, refer to 9, “Troubleshooting.”
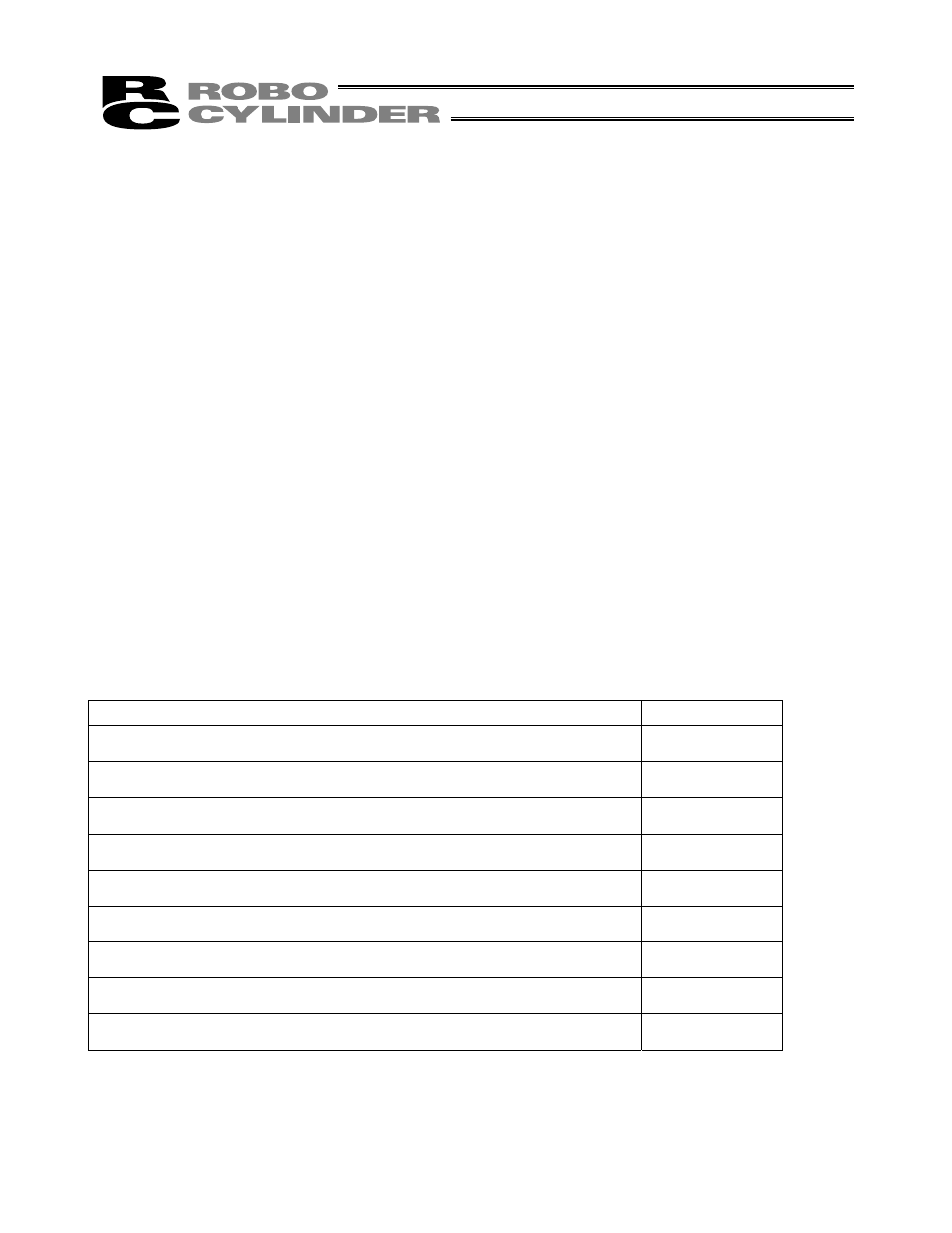
(Reference) Output Signal Changes in Each Mode
Mode classification
PEND
HEND
Actuator is stopped with the servo ON after the power was input
ON
OFF
Home return is in progress following an input of the home return signal
OFF
OFF
Home return has completed following an input of the home return signal
ON
ON
Actuator is moving in the positioning/push & hold mode
OFF
ON
Actuator is paused in the positioning/push & hold mode
OFF
ON
Positioning has completed in the positioning mode
ON
ON
Actuator has stopped after contacting the load in the push & hold mode
ON
ON
Actuator has stopped after missing the load (no load) in the push & hold mode
OFF
ON
Motor drive power is cut off after home return
OFF
ON
(Note)
Use PEND to determine whether the actuator has stopped after contacting the load or missing the load
in the push & hold mode.