IAI America ERC User Manual
Page 109
89
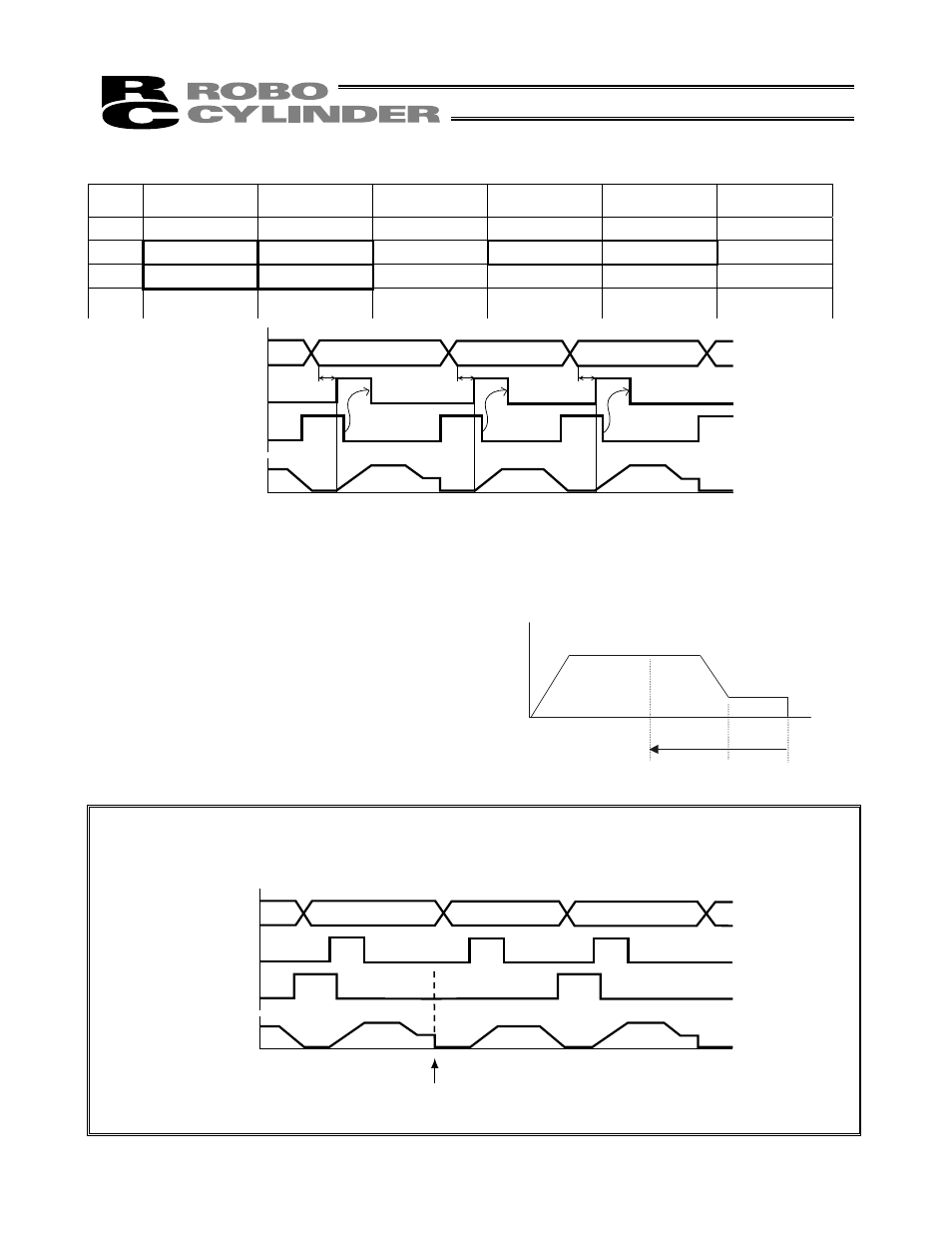
Speed
Return action
Push & hold
completion position
240 mm
280 mm
If the actuator has missed the load, the position
complete output will not turn ON.
Position 1
Position 2
Position 1
Command position
Start
Position complete
Actuator movement
Speed
Position-data table (Field(s) within thick line must be entered.)
No. Position
Speed
Acceleration/
deceleration
Push Positioning
band
Acceleration
only MAX
0
* * * * * *
1 280
200
0.3
50
15
0
2
40 100
0.3 0 0.1 0
T1: 6 msec or more; time after selecting/entering a command position until the start input turns ON
(The scan time of the host controller must be considered.)
Each command position must be input after the position complete output has turned ON for the movement to the
previous position.
7.5.1 Return Action after Push & Hold by Relative Coordinate Specification
It should be noted that in a return action by relative
coordinate specification, the reference position is not the
current position at which the actuator is stopped after
completing the push & hold. Rather, it is the target
position specified in the position number with which the
push & hold was executed.
In the above example, the actuator will move to the 240-
mm position (280 – 40) if a relative coordinate of -40 mm
is set in position No. 2.
Note: When the start signal turns ON, the position complete output will turn OFF.
The start signal must be turned OFF with the confirmation that the position complete output has
turned OFF while the start signal remains ON.
If the actuator has missed the load, the position complete output will not turn ON as shown below.
Position 1
Position 2
Position 1
Command position
Start
Position complete
Speed
Actuator movement
T
1
T
1
T
1