IAI America ERC User Manual
Page 47
27
3.2.2 Details of Input Signals
The input signals from this controller have an input time constant, in order to prevent malfunction caused by
chattering, noise, etc.
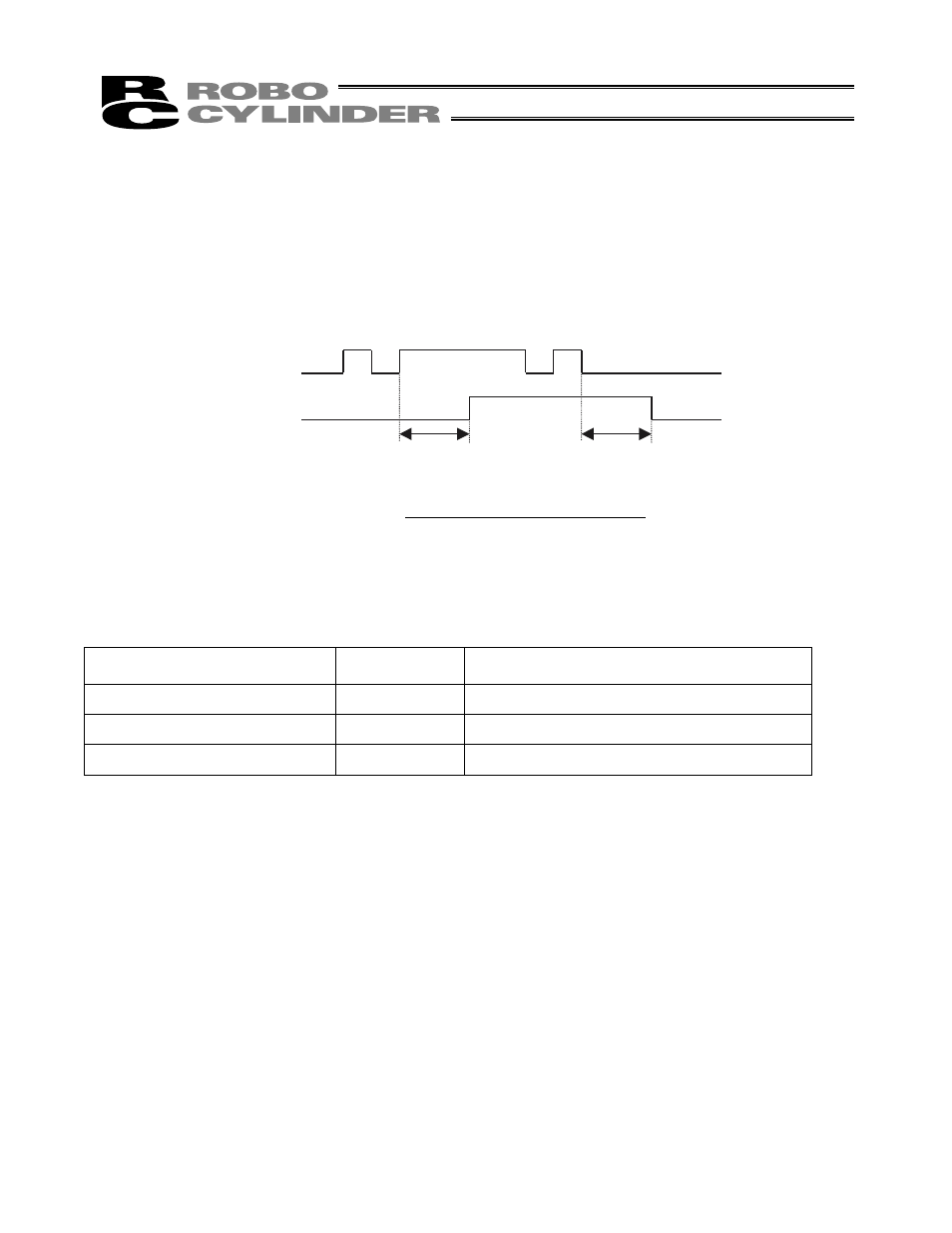
Each input signal will switch the applicable setting when received continuously for 6 msec or more.
In other words, when a given input is switched from OFF to ON, the controller will recognize the ON state of the
signal only after elapse of 6 msec.
The same applies to the switching of an input from ON to OFF. (Fig. 1)
Fig. 1 Recognition of Input Signal
Movement to each position (ST0 to ST2)
When the OFF
ON rise edge of each movement signal is detected, the actuator will move to the target
position corresponding to the applicable position data.
Before executing a command using any of these signals, make sure the target position, speed and other
operation data are set in the position table using a PC or teaching pendant.
Input signal
Corresponding
position number
Remarks
Rear end move (ST0)
0
Set the rear end position in position No. 0.
Front end move (ST1)
1
Set the front end position in position No. 1.
Intermediate point 1 move (ST2)
2
Set the intermediate point in position No. 2.
If a movement command is issued when the first home return is not yet completed after the power was input,
home return will be performed automatically to establish the coordinates first, after which the actuator will move
to the target position.
Pause (*STP)
When this signal turns OFF while the actuator is moving, the actuator will decelerate to a stop.
The remaining movement is retained and will be resumed when the signal is turned ON again.
The *STP signal can be used for the following purposes:
[1] Provide a low-level safety measure to stop the axis while the servo is ON, such as a sensor that detects a
person approaching the system
[2] Prevent contact with other equipment
[3] Perform positioning based on sensor or LS detection
(Note)
If the *STP signal is input while the actuator is performing home return, the movement command will
be retained if the actuator is yet to contact a mechanical end. If the signal is input after the actuator has
reversed upon contacting a mechanical end, home return will be performed again from the beginning.
6 [msec]
6 [msec]
Input signal
Recognition by the controller
Not recognized
Not recognized