IAI America ERC User Manual
Page 125
105
Default acceleration only MAX flag
To cause the actuator to decelerate gradually when stopping, a lower acceleration/deceleration should be set.
However, this will also reduce the acceleration.
This parameter allows for quick acceleration while reducing the deceleration.
However, the actual load must be one-third the rating or less.
Check the payload rating by referring to 1.3, “Specifications.”
The factory setting is “0: [Disable].”
When a target position is written to an unregistered position table, the setting in this parameter will be used as
the acceleration only MAX data for the applicable position number.
To enable the default value, change parameter No. 11 to “1: [Enable].”
Push & hold stop judgment period
This parameter is used as a judgment condition when determining if the load was contacted and the push & hold
operation has completed.
The push & hold operation is judged complete if the current-limiting value set in the position table has been
maintained for the period set in parameter No. 6.
Set an optimal value by considering the shape and strength of the load, as well as the current-limiting value.
The minimum setting unit is “1 [msec],” and the maximum judgment period is “255 [msec].” The factory setting is
“255 [msec].”
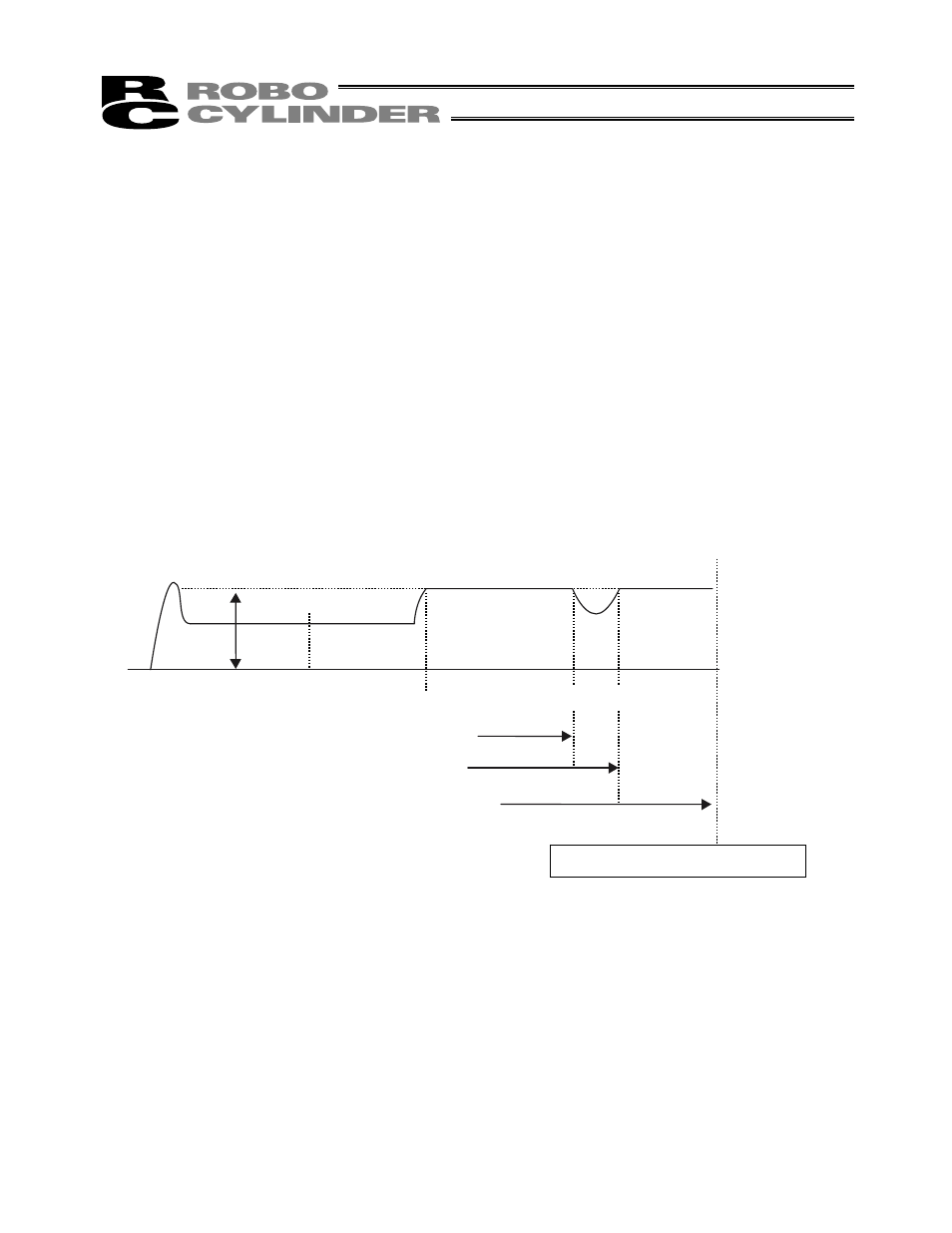
(Note) If the load has shifted and the current has changed during the push & hold judgment, the judgment
follows the timing chart shown below. This example assumes a judgment period of 255 msec.
After reaching the push current, it is maintained for 200 msec. The current drops during the subsequent 20-msec
period, and accordingly the count is decremented by 20. Therefore, when the operation is resumed the count will
start from 180. Since the count will reach 255 after 75 msec at the push current, the controller will determine that
the push & hold operation has completed.
In this example, the total judgment period is 295 msec.
Current-limiting value at standstill during positioning
The factory setting conforms to the standard specification of the actuator.
Increasing this setting will increase the holding torque at standstill.
This setting need not be changed in normal conditions of use. However, to prevent hunting caused by large
external force applied while the actuator is at standstill, the value set in parameter No. 12 must be increased.
(Do not increase the value beyond 70%.)
Push current
20 msec
Start position
Target position
Counting starts
Counting continues until 200
Count is decremented to 180
Count is incremented to 255
Judgment of push & hold completion
75 msec