03 feedback parameter, Encoder (pg) signal type, Encoder pulse – Delta 1.07 VFD-D D User Manual
Page 68: Encoder input type setting
Chapter 4 Parameter Settings|DD Series
4-44
03 Feedback Parameter
This parameter can be set during operation.
Encoder (PG) Signal Type
Control mode
VFPG
FOCPG
FOCPM
Factory setting: 7
Settings 0: No function
1: ABZ
7: PWM pulse
Detection of the magnetic pole: Setting 1: The AC motor drive will output short circuit to detect the
position of the magnetic pole. At this moment, the motor will generate a little noise.
Reference table for encoder and tuning
Setting of PG signal type Encoder (PG) Signal type
Pr.01-00=01
Pr.01-00=03
03.00=1
A, B, Z
Motor will run
Motor will run
03.00=7
PWM
Motor will run
Motor will run
Encoder pulse
Control mode
VFPG
FOCPG
FOCPM
Factory setting: 256
Settings 1~25000
A Pulse Generator (PG) or encoder is used as a sensor that provides a feedback signal of the motor
speed. This parameter defines the number of pulses for each cycle of the PG control (PPR).
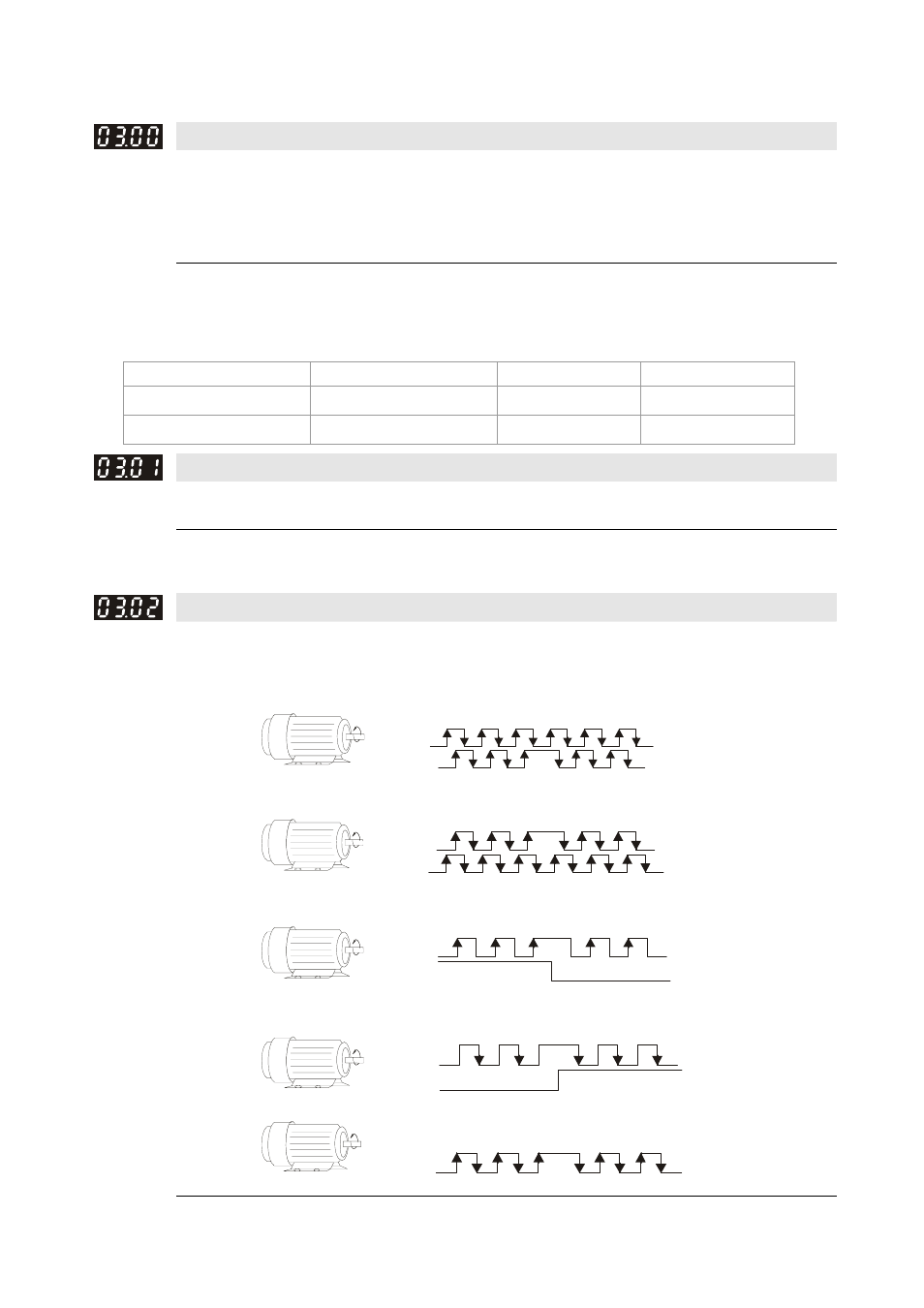
Encoder Input Type Setting
Control mode
VFPG
FOCPG
FOCPM
Factory setting: 1
Settings 0:
Disable
1: Phase A leads in a forward run command and phase B leads in a reverse run
command
For war d
running
A
B
FWD
REV
2: Phase B leads in a forward run command and phase A leads in a reverse run
command
Forwar d
running
A
B
FWD
REV
3: Phase A is a pulse input and phase B is a direction input. (low input=reverse
direction, high input=forward direction)
For war d
running
A
B
FWD
REV
4: Phase A is a pulse input and phase B is a direction input. (low input=forward
direction, high input=reverse direction)
Forward
running
A
B
FWD
REV
5: Single-phase input
For war d
running
A
It is helpful for the stable control by inputting correct pulse type.