AEM 30-71XX Infinity Stand-Alone Programmable Engine Mangement System Full Manual User Manual
Page 270
264
© 2014 AEM Performance Electronics
Infinity User Manual
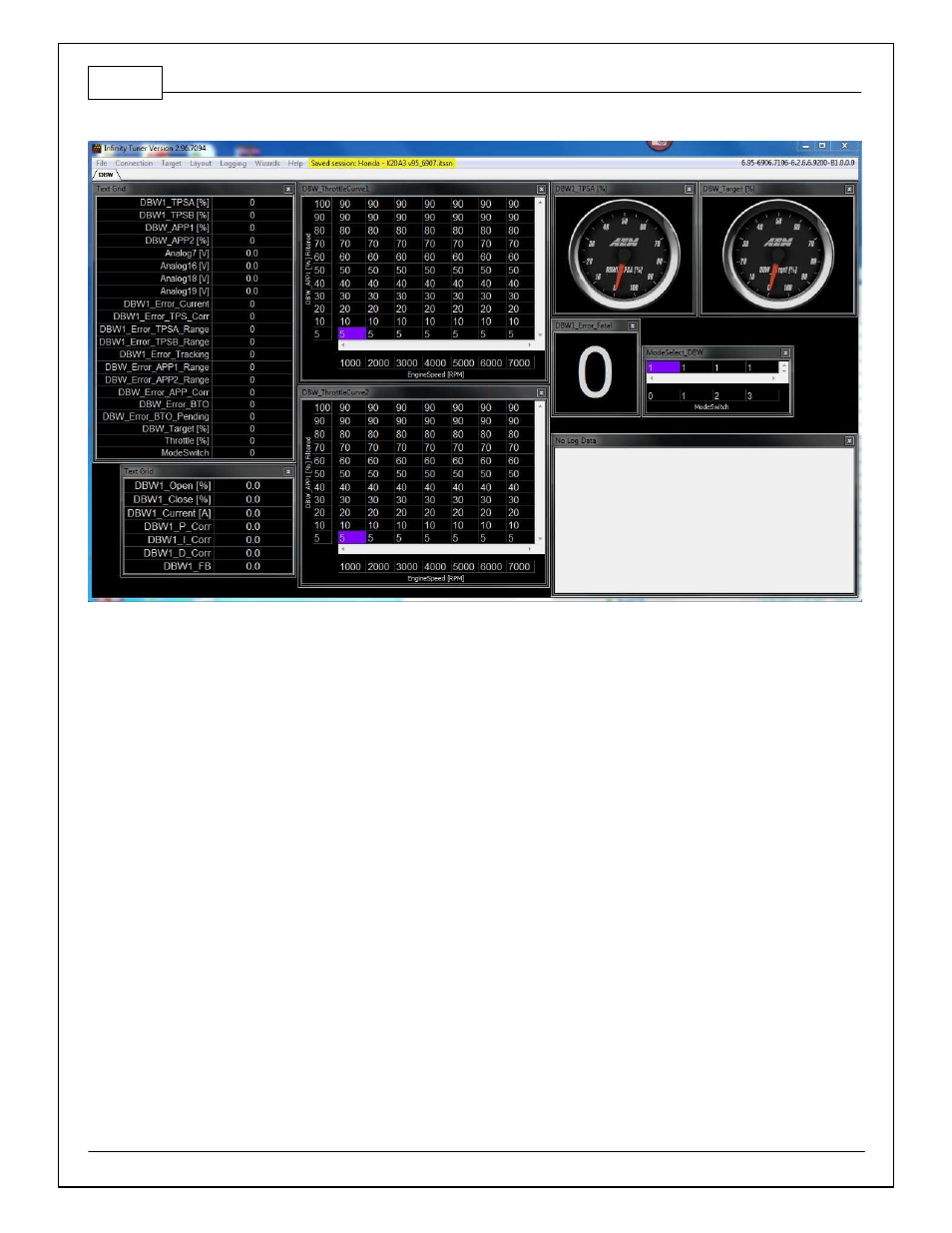
DBW1_Open [% ] is the duty cycle being used to open the throttle motor, possible values are 0
to (+100)%
DBW1_Close [% ] is the duty cycle used to close the throttle motor, possible values are (-100) to
0%
DBW1_Current [A] is a measured value, the ECU measures the amount of current that the
throttle motor is drawing from the ECU
DBW1_Current_Avg (not shown above) is a calculated value, the ECU measures the amount of
current that the throttle motor is drawing from the ECU. This value is smoothed out and filtered
pretty heavily.
The center-right plot window shows the contribution of each of the P, I, and D gains... These are
using the same scale as the DBW1_Open and DBW1_Close, so if DBW1_P_Corr is +35 that
means the 'P' component of the PID feedback system is adding 35% duty cycle to the throttle
motor output.
The lower-right plot window shows the DBW1_Target (desired value) vs DBW1_TPSA [%]
(actual value). The PID feedback loop is simply trying to make the actual value match the desired
value.
Another tool that may help greatly is to change the DBW_Bias % table. This is the open-loop duty
cycle starting point used to hit certain DBW Targets. Similar to the Idle Base table this is the first
step before the DBW PID feedback kicks in. Try watching the DBW1_Open value when the