5 notes on robo grippers – IAI America PCON-SE User Manual
Page 93
81
4. Description of Operating Functions
4.5 Notes on ROBO Grippers
(1) Finger
Operation
[1] Definition
of
Position
With the two-finger specification, the stroke represents the sum of travels of both fingers.
Accordingly, the travel of each finger is one-half the stroke.
The specified position indicates the travel of each finger from the home position toward the closing side.
For example, the maximum command value is 5 mm for the GRS type and 7 mm for the GRM type.
[2] Definition of Speed and Acceleration
Command values apply to each finger.
With the two-finger type, the actual speed (relative speed) and acceleration are twice the command values.
[3] Operation Mode in Gripper Applications
In applications where the ROBO Gripper is to grip the work, be sure to select the “push mode.”
(Note)
If the “positioning” mode is selected, a servo error may generate while the actuator is gripping the
work.
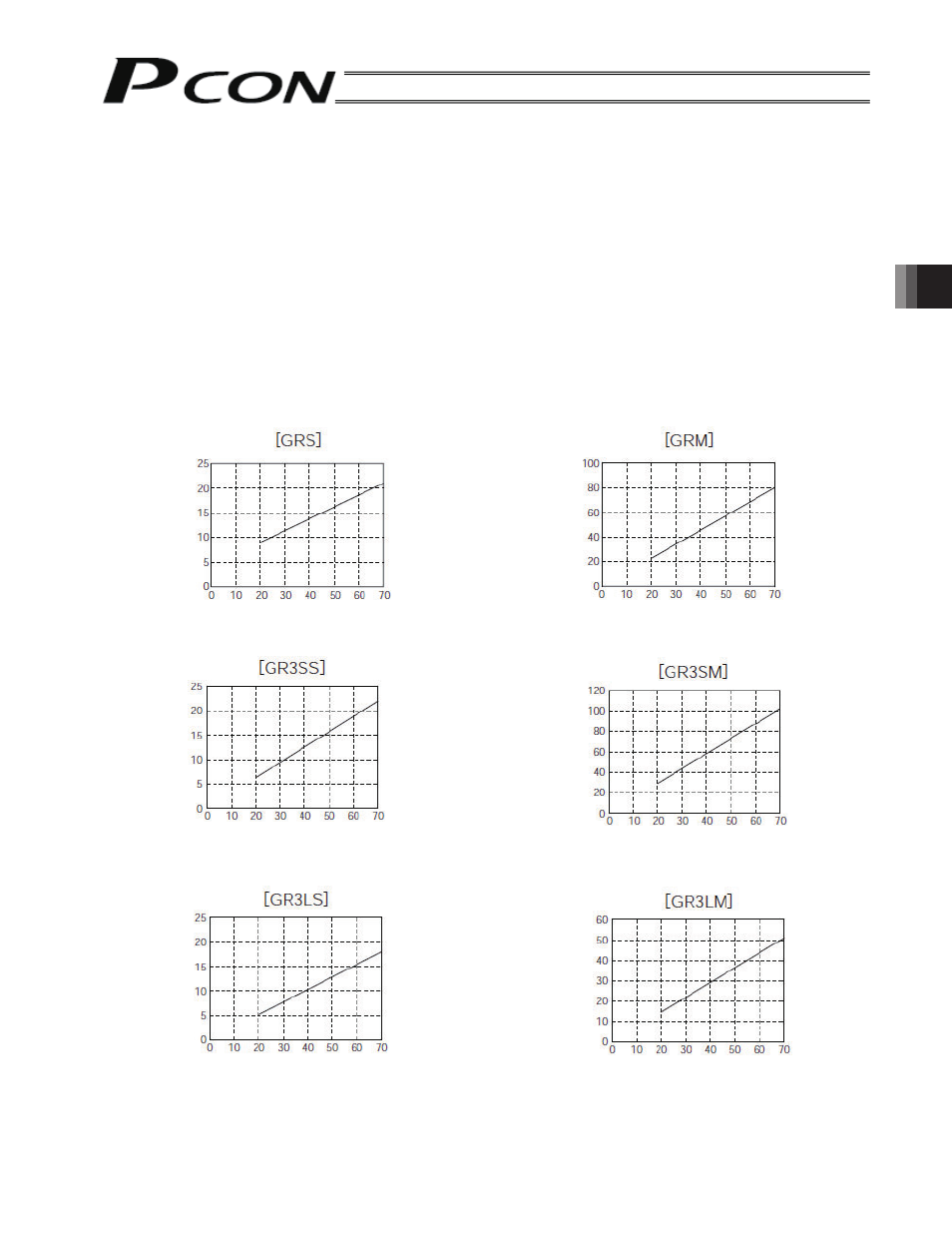
[Graphs of Gripping Force and Current-limiting Value]
Current-limiting value (ratio, %)
Current-limiting value (ratio, %)
Current-limiting value (ratio, %)
Current-limiting value (ratio, %)
Current-limiting value (ratio, %)
Current-limiting value (ratio, %)
Grippi
ng force (N)
Grippi
ng force (N)
Grippi
ng force (N)
Grippi
ng force (N)
Grippi
ng force (N)
Grippi
ng force (N)