IAI America PCON-SE User Manual
Page 55
43
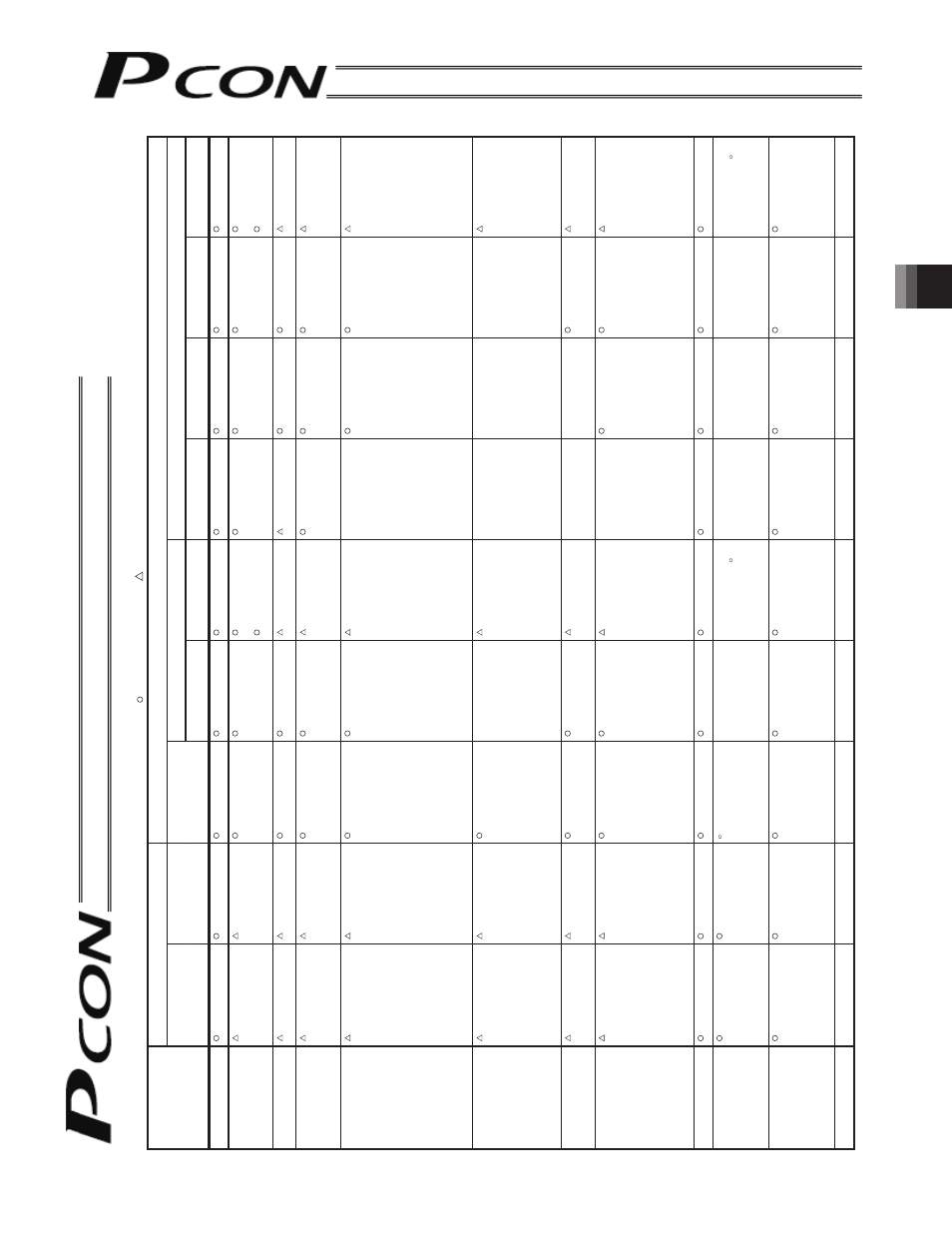
4. Description of Operating Functions
List
of
PCO
N
-SE
Functions
:
D
ire
ct
contr
o
l
:
Indire
ct
control
×:
Inv
alid
O
per
ati
on
b
y
pos
it
ion
num
ber
s
pec
if
ic
atio
n
O
per
ati
on
b
y
num
er
ic
s
pec
if
ic
ation
y
a
w
et
a
g
k
ni
L-
C
C
y
a
w
et
a
g
t
e
N
e
ci
v
e
D
Ser
ia
l
c
om
m
unic
a
tio
n
G
a
te
w
a
y
p
o
s
it
ion
n
um
ber
s
pec
if
ic
atio
n
m
ode
Ser
ial
c
o
m
m
unic
atio
n
Dir
e
c
t num
e
ric
s
pec
if
ic
atio
n
m
ode
Com
m
and
s
pec
if
ic
ation
m
ode
Pos
it
ion
data
lim
iting
m
ode
Norm
al
pos
iti
oni
ng
m
ode
Pus
h
&
ho
ld
ena
bl
ed
m
ode
Com
m
and
s
pec
if
ic
ation
m
ode
Hom
e
retur
n
oper
a
tio
n
Pos
it
ion
in
g
op
er
at
ion
S
p
ec
if
y
the
pos
it
io
n
ta
b
le
n
o
.
Sam
e
as
at
the
left
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
ta
b
le
n
o
.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
dat
a
direc
tl
y.
S
p
ec
if
y
the
pos
it
io
n
ta
b
le
n
o
.
S
p
ee
d
s
e
tti
ng
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Sam
e
as
at
the
left
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
dir
ec
tl
y.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
dir
ec
tl
y.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Set
th
e
p
aram
eter
.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
dir
ec
tl
y.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
dir
ec
tl
y.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Ac
c
elerat
io
n
/dece
le
ra
tio
n
s
ettin
g
Set
the
ac
c
eler
at
io
n
and
decel
e
ration
s
ep
arate
ly
in
the
pos
it
ion
tab
le.
Sam
e
as
at
the
left
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
as
the
ac
c
elerat
ion/
dec
e
ler
ati
on.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
as
the
ac
c
elerat
ion/
dec
e
ler
ati
on.
Set
the
ac
c
eler
at
io
n
and
decel
e
ration
s
ep
arate
ly
in
the
pos
it
ion
tab
le.
Set
th
e
p
aram
eter
a
s
the
ac
c
e
lerat
ion/
dec
e
ler
ati
on.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
as
the
ac
c
elerat
ion/
dec
e
ler
ati
on.
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
as
the
ac
c
elerat
ion/
dec
e
ler
ati
on.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
O
p
er
ati
o
n
a
t d
if
ferent
ac
c
eler
at
ion/
dec
e
ler
at
ion
Set
the
ac
c
eler
at
io
n
and
decel
e
ration
s
ep
arate
ly
in
the
pos
it
ion
tab
le.
Sam
e
as
at
the
left
T
he
ac
c
eler
ati
on/
d
e
ce
le
ra
ti
o
n
da
ta
is
ac
c
epted
at
p
os
it
ion
ing
s
ta
rt
tim
e.
T
h
er
ef
ore,
to
s
pec
if
y
the
d
e
ce
le
ra
ti
o
n
di
ff
e
re
n
t
fr
o
m
the
ac
c
eleration,
c
hange
the
ac
c
elerat
ion/
d
e
ce
le
ra
ti
o
n
da
ta
dur
in
g
m
ovem
ent
and
rest
art
the
con
trol
ler
.
T
he
ac
c
eler
ati
on/
dec
el
er
ati
on
d
at
a
is
ac
c
epted
at
pos
it
ion
ing
s
tar
t
tim
e.
T
h
eref
ore,
to
s
p
ec
if
y
the
d
e
celeration
diff
erent
fr
o
m
the
ac
c
elerat
ion,
c
han
g
e
the
a
c
c
e
lerat
ion/
d
e
ce
le
ra
ti
o
n
da
ta
dur
in
g
m
ovem
ent
and
re
s
tart
the
con
trol
ler
.
Set
the
ac
c
eler
at
io
n
and
decel
e
ration
s
ep
arate
ly
in
the
pos
it
ion
tab
le.
×
Sinc
e
p
a
ra
m
e
te
r
s
ettin
g
is
p
er
for
m
ed
as
the
a
c
c
e
lerat
ion/
dec
e
ler
ati
on,
th
e
ac
c
elerat
ion
an
d
de
c
e
le
ra
ti
on
c
a
nnot
be
s
et
s
ep
ar
ate
ly
.
T
he
ac
c
eler
ati
on/
dec
el
er
ati
on
d
at
a
is
ac
c
epted
at
pos
it
ion
ing
s
tar
t
tim
e.
T
h
eref
ore,
to
s
p
ec
if
y
the
d
e
celeration
diff
e
rent
fr
o
m
the
ac
c
elerat
ion,
c
han
g
e
the
a
c
c
e
lerat
ion/
dec
e
le
ration
d
a
ta
dur
in
g
m
ovem
ent
and
rest
art
the
con
trol
ler
.
T
he
ac
c
eler
ati
on/
d
e
ce
le
ra
ti
o
n
da
ta
is
ac
c
epted
at
pos
it
ion
ing
s
tar
t
tim
e.
T
h
eref
ore,
to
s
p
ec
if
y
the
d
e
celeration
diff
erent
fr
o
m
the
ac
c
elerat
ion,
c
han
g
e
the
ac
c
e
lerat
ion/
d
e
ce
le
ra
ti
o
n
da
ta
dur
in
g
m
ovem
ent
and
res
tart
the
con
trol
ler
.
S
e
t
th
e
a
cce
le
ra
ti
o
n
and
dec
e
le
ration
s
ep
arate
ly
in
the
pos
it
ion
tab
le.
Pitc
h
(i
nc
rem
ent
al)
feedi
ng
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Sam
e
as
at
the
left
If
bit
2
of
th
e
CT
LF
c
ontrol
fl
a
g
is
s
e
t
to
“1,”
inc
rem
ent
a
l
op
e
rati
on
st
a
rt
s.
×D
ir
e
c
t
p
ro
c
e
s
s
in
g
c
annot
be
perf
or
m
ed.
Issu
e
a
po
si
ti
o
n
c
o
m
m
and
b
y
add
ing
th
es
a
m
ed
is
ta
n
c
et
o
or
s
ubtracting
it
fro
m
the
c
u
rrent
pos
itio
n
with
th
e
hos
t
PLC.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
×
D
ir
e
c
t
p
ro
ce
ssi
n
g
c
annot
be
perf
or
m
ed.
Is
s
ue
a
p
o
si
tion
c
o
m
m
and
b
y
add
ing
the
s
am
e
dis
tanc
e
to
or
s
ubtracti
n
g
it
fro
m
the
c
u
rrent
pos
itio
n
with
th
e
hos
t
PLC.
×
D
ir
e
ct
p
ro
ce
ssi
ng
c
annot
be
perf
o
rm
ed.
Is
s
ue
a
p
o
si
tion
c
o
m
m
and
b
y
add
ing
th
es
a
m
ed
is
ta
n
c
et
o
or
s
ubtracti
ng
it
fr
o
m
the
c
urrent
pos
itio
n
with
th
e
hos
t
PLC.
×
D
ir
e
c
t
p
ro
ce
ssi
n
g
c
annot
be
perf
or
m
ed.
Issu
e
a
po
si
ti
o
n
c
o
m
m
and
b
y
add
ing
th
es
a
m
ed
is
ta
n
c
et
o
or
s
ubtracting
it
fro
m
the
c
u
rrent
pos
itio
n
with
th
e
hos
t
PLC.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Pus
h
&
h
old
o
p
e
rati
on
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Sam
e
as
at
the
left
Sp
e
c
if
y
a
n
u
m
e
ri
c
va
lue
dir
ec
tl
y.
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
Ч
Ч
Dir
e
c
t num
e
ric
s
pec
if
ic
atio
n
Set
it
in
th
e
p
os
it
ion
ta
b
le
.
S
pe
ed
c
ha
ng
e
dur
ing
mo
v
e
me
n
t
Com
bine
tw
o
or
m
or
e
pos
it
ion
nos
.
Sam
e
as
at
the
left
T
h
e
s
peed
d
a
ta
is
ac
c
epted
at
p
os
it
ion
ing
s
tart
tim
e.
T
h
eref
ore,
to
c
h
an
ge
the
s
p
eed
dur
in
g
m
ovem
ent,
c
hange
the
s
p
ee
d
data
dur
in
g
m
ovem
ent
and
res
tart
the
con
trol
ler
.
T
h
e
s
peed
d
a
ta
is
ac
c
epted
at
pos
it
ion
ing
s
tar
t
tim
e.
T
h
er
ef
ore,
to
c
hang
e
the
s
pe
ed
dur
in
g
m
ove
m
ent,
c
han
ge
the
s
peed
dat
a
dur
ing
mo
v
e
me
n
t
a
n
d
re
s
ta
rt
the
contr
o
ller
.
Com
bine
tw
o
or
m
or
e
pos
it
ion
nos
.
×
Dir
ec
t
pr
oc
es
s
in
g
c
annot
be
perf
or
m
ed.
Issu
e
a
po
si
ti
o
n
c
o
m
m
and
b
y
add
ing
th
es
a
m
ed
is
ta
n
c
et
o
or
s
ubtracti
ng
it
fr
o
m
the
c
urrent
pos
itio
n
with
th
e
hos
t
PLC.
Dir
ec
t
pr
oc
es
s
in
g
c
annot
be
perf
or
m
ed.
Is
s
ue
a
p
o
si
tion
c
o
m
m
and
b
y
add
ing
th
es
a
m
ed
is
ta
n
c
et
o
or
s
ubtracting
it
fro
m
the
c
u
rrent
pos
itio
n
with
th
e
hos
t
PLC.
Com
bine
tw
o
or
m
or
e
pos
it
ion
nos
.
Paus
e
Zone
s
igna
l
Set
it
in
th
e
p
os
it
ion
ta
bl
e
o
r
with
th
e
u
ser
p
aram
eter
. O
utput
si
g
n
al
:
P
ZON
E
,
ZONE
1
,
ZON
E
2
Set
it
with
the
us
er
p
aram
eter
. O
utput
si
g
n
al
:
Z
ON
E
1
,
ZONE
2
Set
it
with
the
us
er
pa
ra
m
e
te
r.
O
utput
s
ign
al:
ZON
E
1,
ZONE
2
×
:
n
oit
ar
e
p
o
t
c
eri
d
el
p
mi
S
×
Pos
it
ion
er
op
eration:
×
:
n
oit
ar
e
p
o
t
c
eri
d
el
p
mi
S
Ч
Ч
Ч
Pos
it
ion
er
op
eration:
Po
w
er
s
a
v
ing
m
ode
T
h
e
p
o
w
er-s
av
ing
m
ode
fo
r
fu
ll-
s
e
rv
o
c
o
n
tr
ol
c
a
n
b
e
s
e
lec
ted
us
in
g
p
ar
am
eter
53.
(T
he
aut
o
servo
OFF
m
ode
c
annot
b
e
selected.)
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Sam
e
as
at
the
left
Pos
it
ion
tab
le
Requ
ir
ed
Requ
ir
ed
Not
req
uir
e
d
Not
req
uir
e
d
Requ
ir
ed
N
o
t
re
qu
ir
ed
Requ
ir
ed
Requ
ir
ed
Requ
ir
ed