IAI America PCON-SE User Manual
Page 109
97
5. Parameter Settings
Speed loop integral gain (No. 32 VLPT)
Parameter No.
Unit
Input range
Default
32
1 – 217270 Individual setting in accordance with actuator characteristics
Torque filter time constant (No. 33 TRQF)
Parameter No.
Unit
Input range
Default
33
1 – 2500
Individual setting in accordance with actuator characteristics
This parameter defines the filter time constant to the torque command.
If the resonant frequency of the machine equals to or less than the response frequency of the servo loop, the
motor will generate vibrations.
Increasing the setting in this parameter will be able to suppress the resonance of this machine system.
However, excessively increasing the setting may impair the stability of the control system.
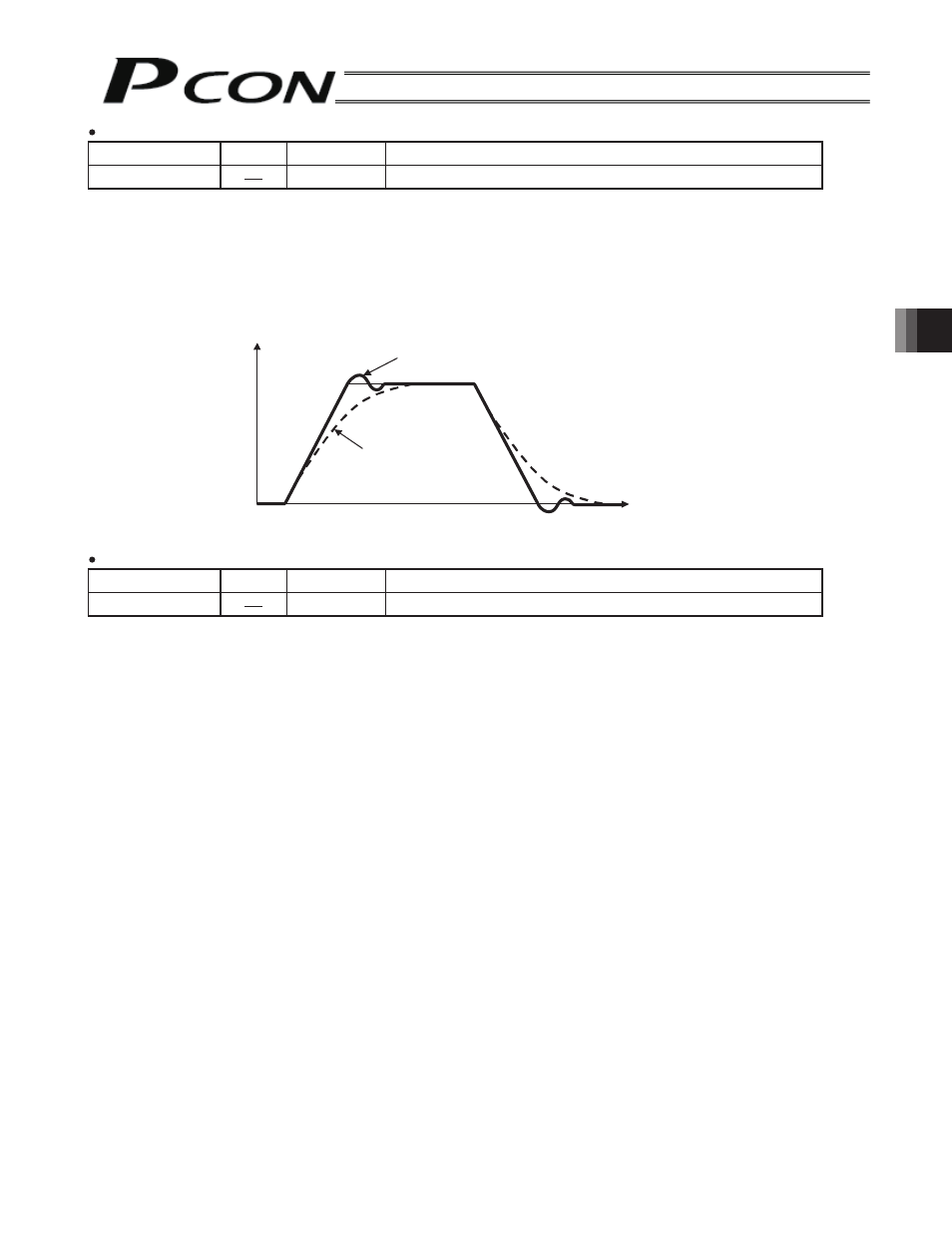
This parameter determines the level of response with respect to a speed control loop.
Decreasing the setting results in lower response to the speed command and decreases the reactive
force upon load change. If the setting is too low, compliance with the position command drops and the
positioning time increases as a result.
Increasing the setting too much increases the tendency of the actuator to overshoot or oscillate,
resulting in increased mechanical vibration.
Speed
Setting is low
Setting is high (overshoot)
Time