IAI America PCON-SE User Manual
Page 108
96
5. Parameter Settings
5.2.4 Servo
Gain
Adjustment
Since servo adjustment is made in accordance with the standard specification of the actuator before shipment,
this setting need not be changed in normal conditions of use.
However, because vibrations or abnormal sounds may be produced due to the affixing method of the actuator or
load conditions, parameters related to servo adjustment are released.
Especially custom-made items (the lead length of the ball screw is greater, stroke is longer, etc., than the standard
items) may produce vibrations or abnormal sounds with the effect of external conditions.
In such cases, the parameters shown below need to be changed. Please contact IAI.
• Servo gain number (No. 7 PLG0)
Parameter No.
Unit
Input range
Default
7
5rad/sec
0 - 31
6
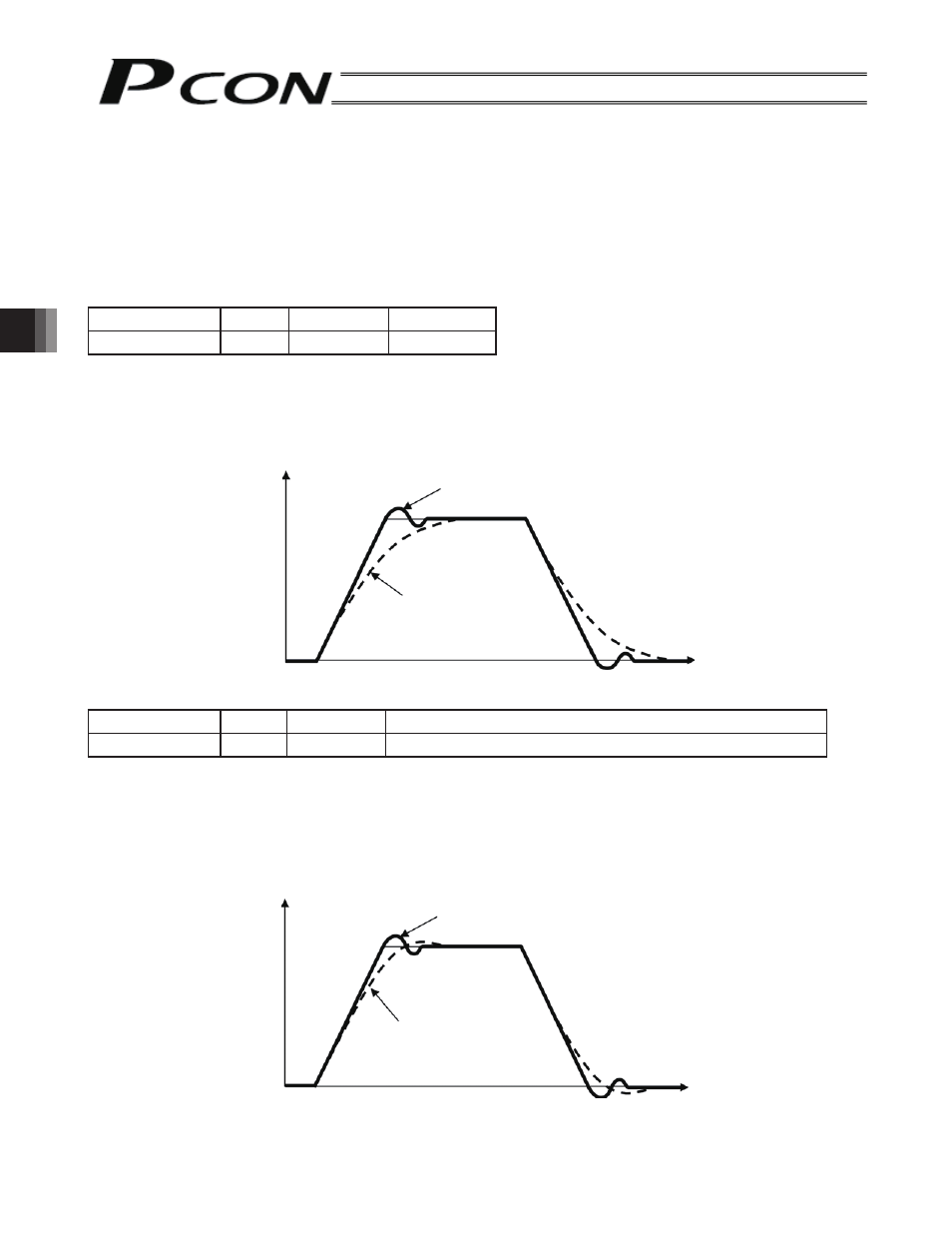
This parameter determines the response of the position control loop.
Increasing the setting in this parameter will enhance the response to the position command.
However, excessively increasing it facilitates producing overshoot.
Lower settings will deteriorate the response to the position command, which requires more time.
• Speed loop proportional gain (No. 31 VLPG)
Parameter No.
Unit
Input range
Default
31
⎯
1 – 27661
Individual setting in accordance with actuator characteristics
This parameter determines the response of the speed control loop.
Increasing the setting in this parameter will enhance the response to the position command. (The servo rigidity
will be higher.)
The higher the load inertia becomes, the larger the value should be set.
However, excessively increasing the setting will cause overshooting or oscillation, which facilitates producing the
vibrations of the mechanical system.
Speed
Lower setting
Higher setting (overshoot)
Time
Time
Speed
Lower setting
Higher setting (overshoot)