IAI America PCON-SE User Manual
Page 122
110
6. T
roubleshooting
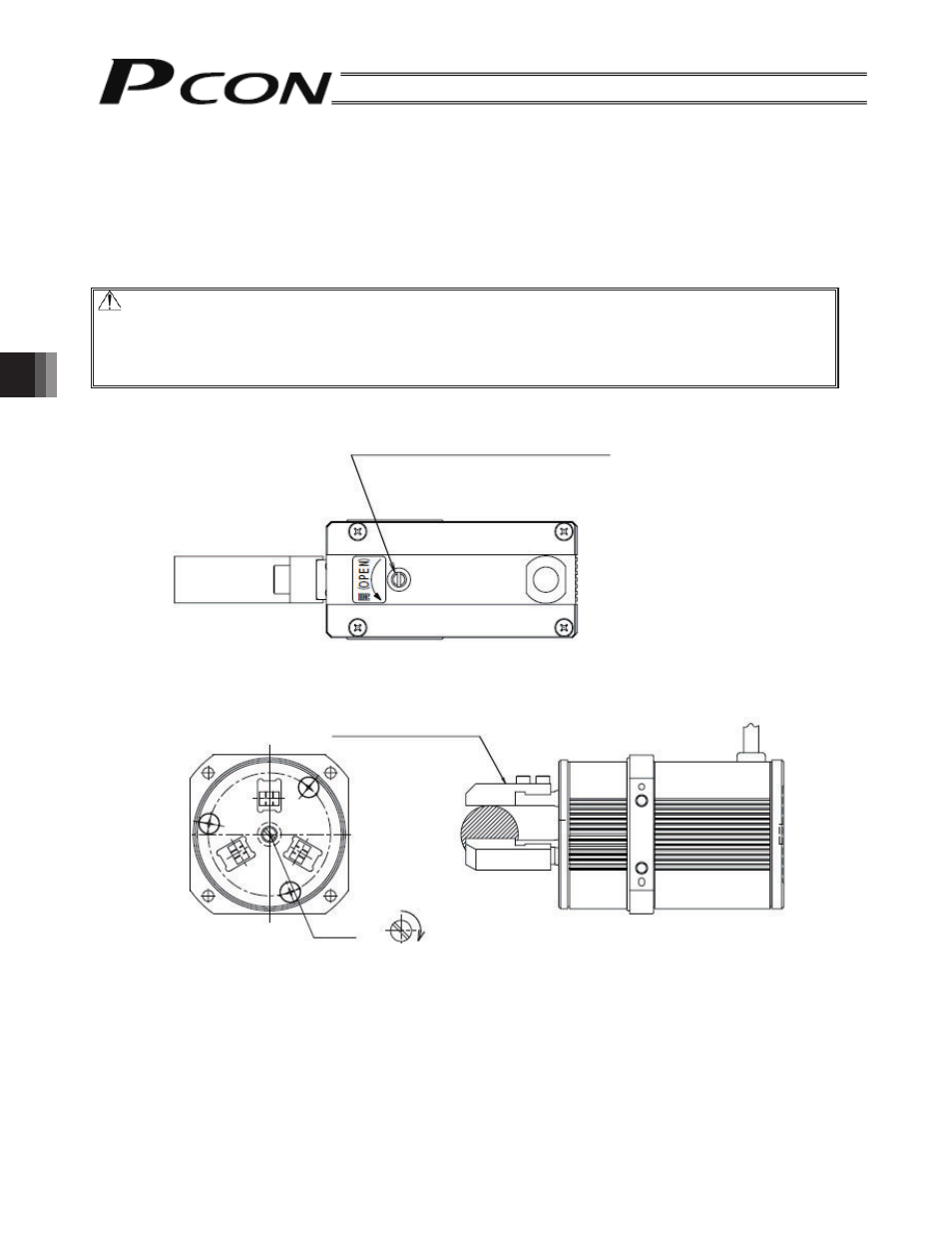
Open/close screw
Use a screwdriver to turn the screw
Turn clockwise.
Take out one of the finger attachments.
Open/close
screw
Open direction
• A servo error generated while the ROBO Gripper was moving.
Cause: The work was not at an appropriate position and the finger attachment(s) contacted the work in the
positioning mode.
Action: Consider the position deviation of the work and readjust the starting position of push and thickness of the
finger attachment (including the buffer material) accordingly so that the work can be clamped in the push
mode.
When resuming the operation, be sure to loosen the finger attachments by turning the open/close screw
and then reset the alarm, because the feed mechanism may be locked.
Caution: If the servo ON signal is disabled or the alarm is reset first while the servo ON signal is still
ON, the servo will remain ON.
In this condition, the open/close screw will return to the current position, even when turned,
and the actuator will remain locked. As a result, issuing a move command again will only
cause the alarm to generate again.
[2-finger Type]
[3-finger Type]
Take out one of the finger attachments and remove the work, and then turn the open/close screw clockwise.