IAI America PCON-SE User Manual
Page 23
11
1. Overview
1.3
Differences from Air Cylinders in Control Functions
For those of you who have been using air cylinders and have never used motorized cylinders before, this section
gives a brief explanation of how this controller is different from air cylinders.
Read the following information and implement controls appropriate for your system.
Item Air
cylinder
PCON-SE
Drive method
Air pressure by solenoid valve
control.
Ball screw or timing belt drive using a pulse motor.
Target position
setting
Mechanical stopper (including
shock absorber).
[1] Position number specification mode
Entry of a coordinate value in the “Position” field of
the position table.
A value can be entered by keying in a number from a
PC/teaching pendant, or by moving the actuator to a
desired position and then reading the achieved
position directly.
Example) Example of entry of “400 mm” stroke
Position No.
Position
0 5
(mm)
1 400
(mm)
2 200
(mm)
[2] Numeric specification mode Direct numerical
specification
Target position
detection
Installation of a reed switch or other
external detection sensor.
Judgment based on internal coordinates determined by
the position information received from the position
detector (encoder).
No external detection sensor is required.
Speed setting
Adjustment by a speed controller.
[1] Entry of a feed speed in the “Speed” field of the
position table (unit: mm/sec).
Note that the rated speed is set automatically as the
default feed speed.
[2] Direct numeric specification
Acceleration/
deceleration setting
In accordance with the load, air
supply volume, and speed
controller/solenoid valve
performance.
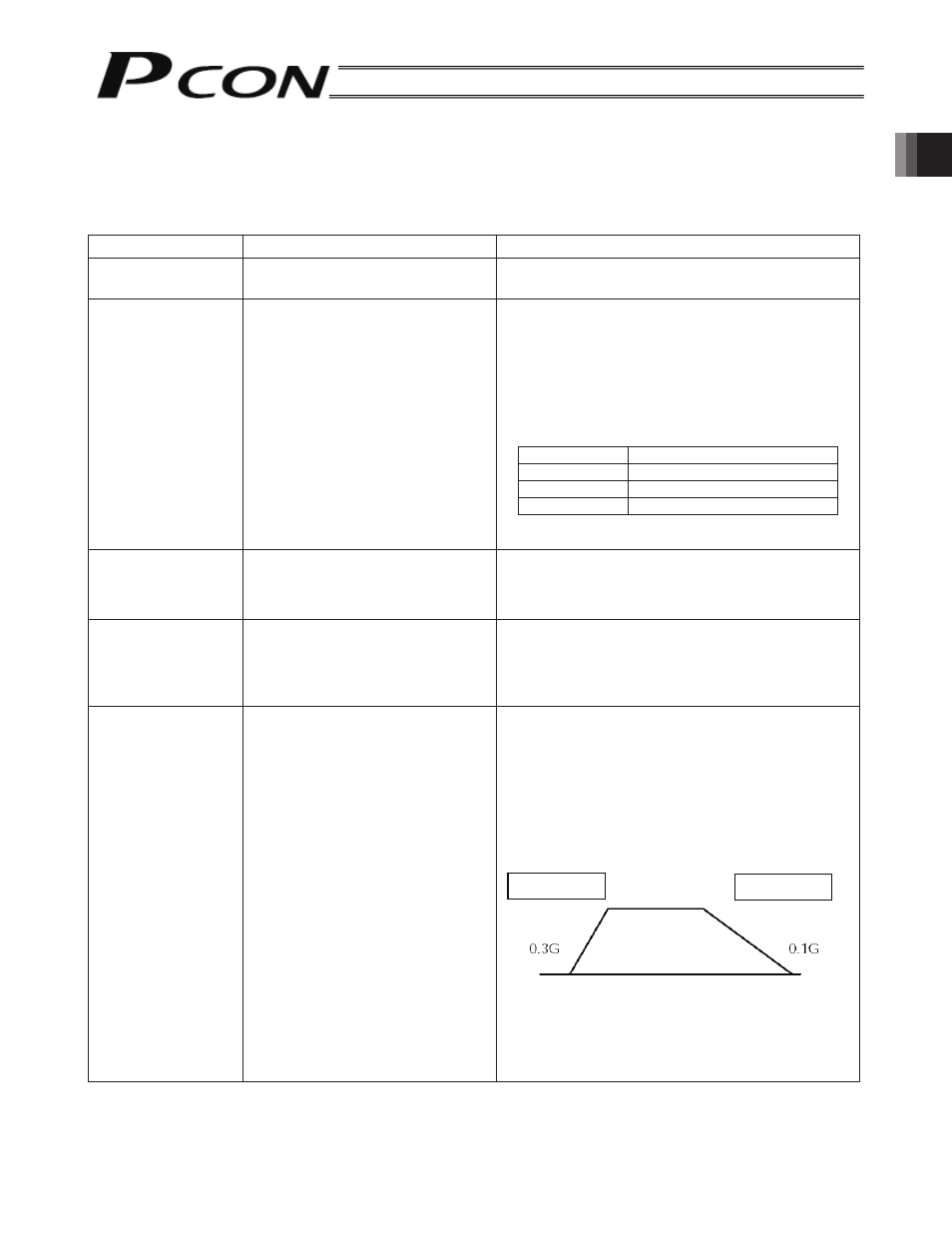
[1] Entry in the “Acceleration” and “Deceleration” fields of
the position table (minimum setting unit: 0.01 G).
Reference: 1 G = Gravitational acceleration
Note that the rated acceleration and deceleration are set
automatically as the default acceleration and
deceleration.
[2] Direct numeric specification
Desired values can be set in fine steps to achieve gradual
acceleration/deceleration curves.
The greater the set value, the steeper the curve
becomes. On the other hand, the smaller the set value,
the more gradual the curve becomes.
Acceleration
Deceleration
Start position
of movement
End
position