Burkert Type 8620 User Manual
Page 88
mxCONTROL Type 8620
Page 88
Gain/amplification factor Kp:
The behaviour of the controller's P-part is influenced by the gain/amplification factor Kp. The
gain/amplification factor Kp has units and is parameterized in (% / unit of the process value).
Proportional part:
Yp[%]
)
(
PV
SP
Kp
−
∗
=
(Module sense of action: normal)
Integral part
(I-part):
The integral part (I-part) of the PID Controller is usually used to prevent a steady state deviation from
the set point.
The reset time Tn
(in seconds) is the time required to achieve an equal correction variable change
through the integral part as it develops because of the proportional part.
Differential part (D-part):
The Differential part (D-part) of the PID Controller is used for the quick response to changes of the
control difference.
The derivative time Tv
(in seconds) is the time required to achieve an equal correction variable
change in case of a rise response of the controller through the D-part, as it develops because of the
proportional part.
Delay time Tz:
The D-part is realized with a delay Tz. Tz is automatically set internally depending on
the derivative time Tv.
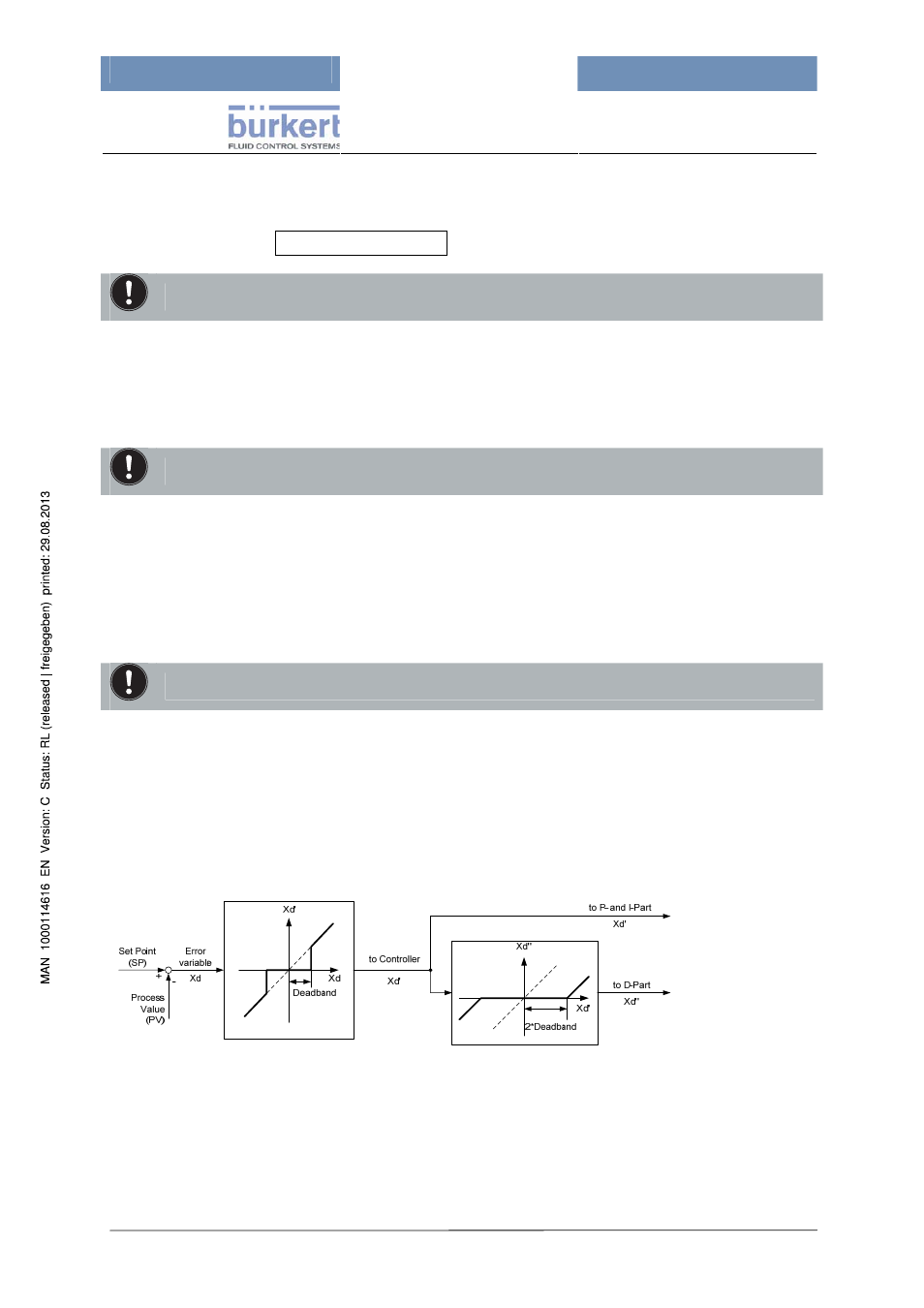
Deadband:
Because of the definition of the deadband, the PID Controller responds only after a certain control
difference. This preserves the connected actuators. Refer to figure “Sense of action” for effect of the
parameter deadband.
The deadband is parameterized in percent of the assigned range of the process value (Scal- and
Scal+).
The D-part
- in addition - has an additional deadband to prevent the control output jumps due to
leaving the deadband. This deadband is set internally to twice the value of the set deadband value.
Figure 29:
Deadband
(COMMON_PID)
The amplification Kp of the process controller relates to the scaled unit of the process value.
The I-part of the PID Controller can be disabled: by defining the reset time Tn at 9999.0 s.
The D-part of the PID Controller can be disabled: By defining the derivative time Tv at 0.0 s.