Arinc 547 localizer deviation with discrete valid, Digital input data, arinc 429 – Honeywell MK VI User Manual
Page 276
Honeywell
MK VI MK VIII EGPWS Installation Design Guide
Proprietary notice on title page applies
CAGE CODE: 97896
SCALE: NONE
SIZE: A
DWG NO: 060-4314-150
REV:
SHEET
276
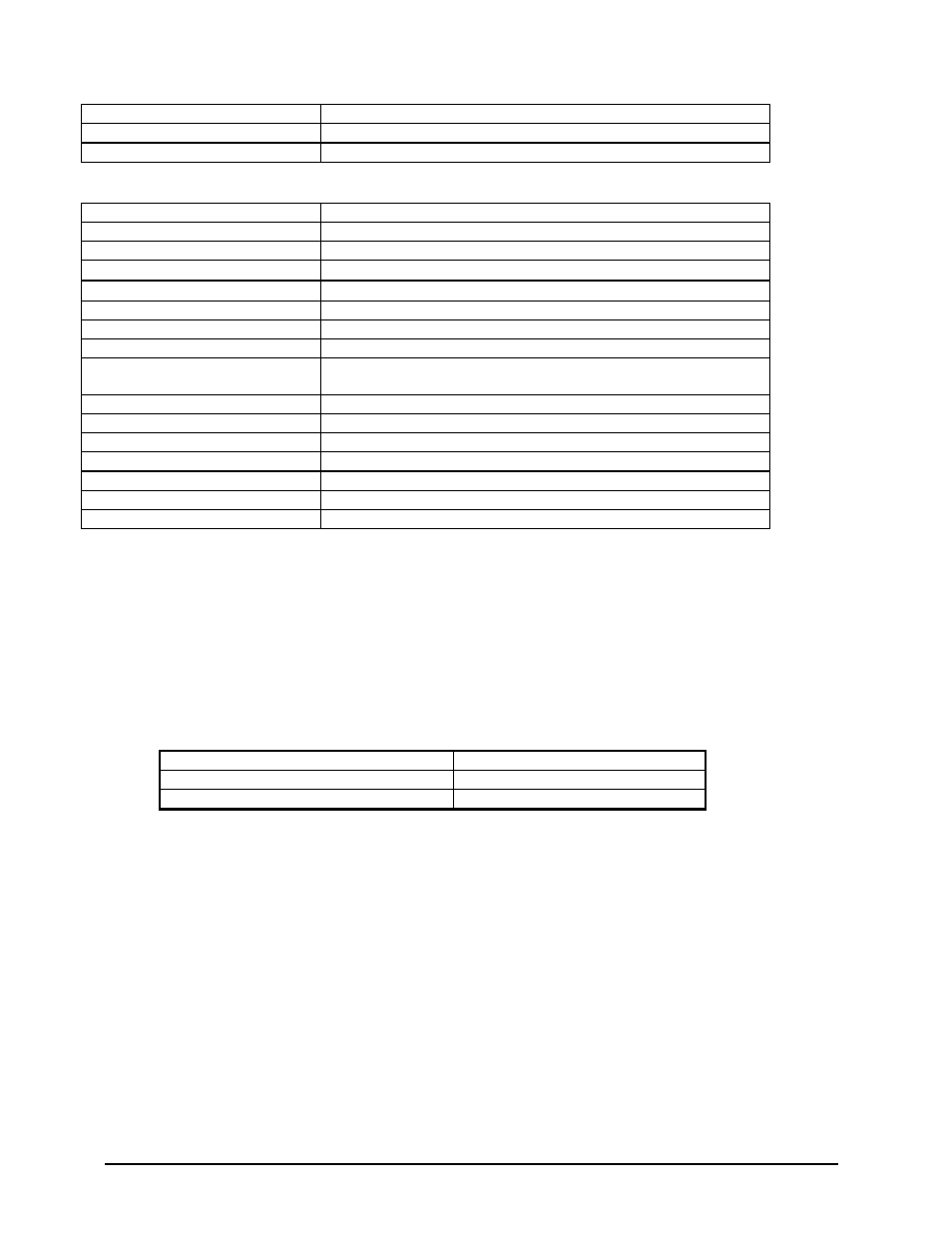
AIC LSB:
2 Feet
AIC Status Mask:
0000200F
External Validity Type:
Discrete Validity, 28V
6.1.17 ARINC 547 Localizer Deviation with Discrete Valid
Data Item
Value
Signal Name:
LocalizerDeviation, DC Signal
AIC Algorithm:
DC Absolute
Signal Dynamic Range:
±
16 Dots
Signal Reasonable Range:
±
12 Dots
Signal Open Wire Threshold
–15 Dots
Reference Dynamic Range:
None
Reference Reasonable Range:
None
Scale:
Loc Deviation (Dots) = 13.333333 Dots/VDC * Volts
in
Positive = Fly Right 75 mV per DOT, 0 Volts = 0 DOT
Input Signal Connection:
(+) = J1-30 (fly right), (–) = J1-10 (fly left)
Input Reference Connection:
None
AIC Name:
D4 (DC4)
External Validity Flag Connection:
J1-48 (+28 VDC discrete)
AIC LSB:
0.00126 Dots
AIC Status Mask:
0000200C
External Validity Type:
Discrete Validity
6.2 Digital Input Data, ARINC 429
The MK VI/VIII EGPWC supports 8 ARINC 429 digital receivers used to monitor broadcast data from other LRUs and to
support interactive protocols. Each receiver channel follows the characteristics of reference document Digital Information
Transfer System (DITS), ARINC Characteristic 429.
Transmission System Interconnect. Each 429 receiver shall be connected to an ARINC 429 transmitter by means of a
single twisted and shielded pair of wires. The shield shall be grounded at both ends and at all production breaks in the
cable to an aircraft ground close to the rack connector.
Receiver Bus Frequency. Receivers are capable of operating at both Low and High speed and are determined by
configuration selection. The following table identifies the bus speed characteristics.
Bus Speed
Bus Frequency
High
100 KBPS +/- 1%
Low
12.0 KBPS to 14.5 KBPS
ARINC Receiver Bus Identification. Each ARINC Receiver Channel is identified with two identifiers, one for each leg
of the twisted wire pair. The identifier is formed as follows:
429RX[Channel Id][Leg] where Channel Id ranges [1-8], and Leg is A for the positive leg and B for the negative leg (see
channel 1 exception in following paragraph). An example of a channel identifier would be 429RX-2A, which identifies
leg A of ARINC 429 channel 2.
In addition, one of the ARINC 429 channels is connected to an UART to provision for RS422 operation. In this case the
channel identifier has been defined as 429_422RX_1A and 429_422RX_1B
SIGN/STATUS Matrix The number of BITS, and the meaning of these BITS, varies depending on the type of data in the
ARINC word.