Honeywell MK VI User Manual
Page 188
Honeywell
MK VI MK VIII EGPWS Installation Design Guide
Proprietary notice on title page applies
CAGE CODE: 97896
SCALE: NONE
SIZE: A
DWG NO: 060-4314-150
REV:
SHEET
188
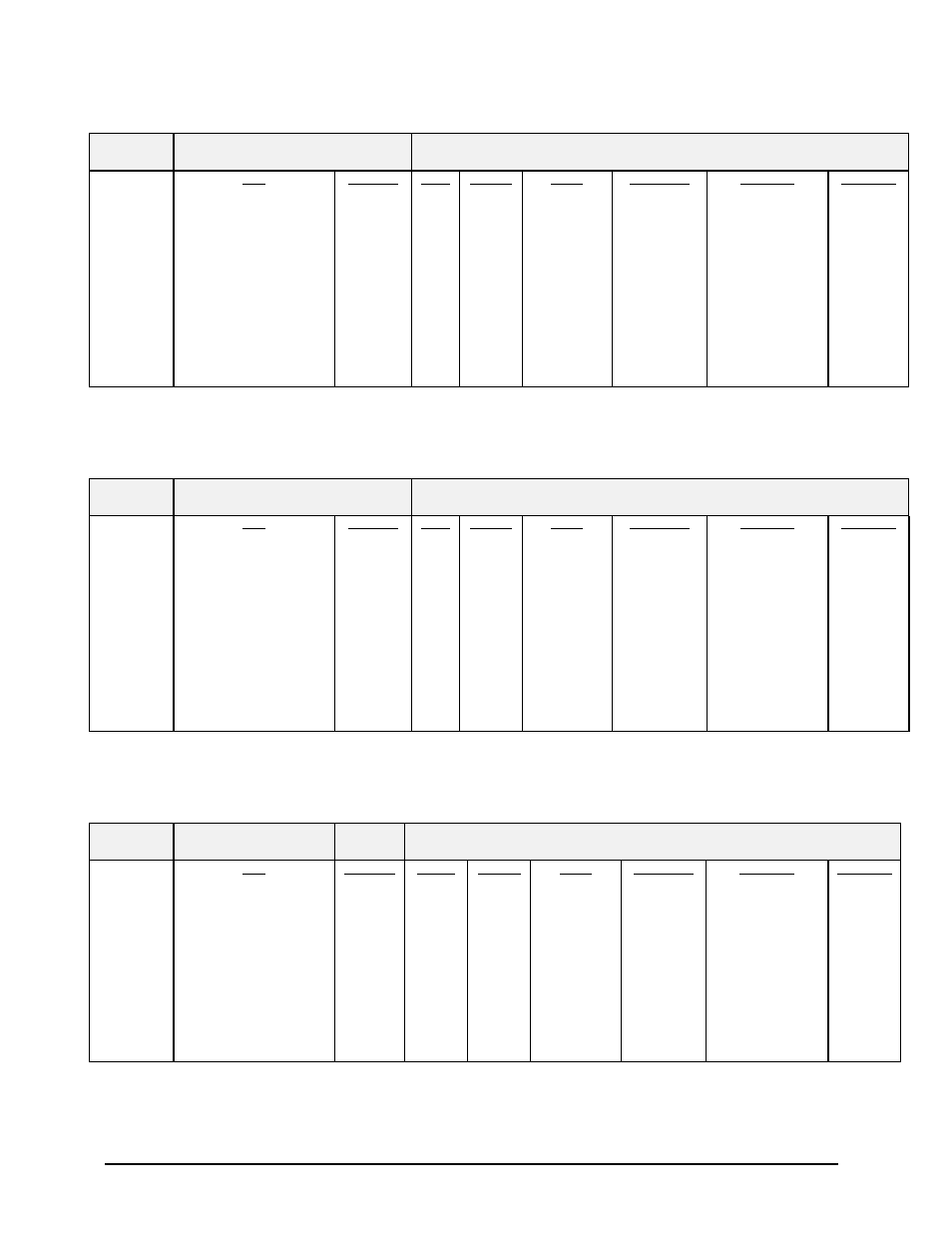
Table 5.3.3-0: Position Input Type 0 (Low Speed ARINC 743A GPS)
CHANNEL
429RX_4
CONNECT TO: GPS (ARINC 743A)
Format: ARINC 429 (Low Speed)
Fault Designation: GPS BUS
Bus Type: Basic
A = J2-25
B = J2-8
Data
Latitude - Normal
Longitude - Normal
GPS Hor. Int. Limit
Altitude
VFOM
HFOM
Ground Speed
True Track Angle
North/South Velocity
East/West Velocity
Vertical Velocity
Sensor Status
**UTC
**Date
Reference
6.2.7
6.2.8
6.2.5
6.2.4
6.2.13
6.2.10
6.2.6
6.2.9
6.2.53
6.2.54
6.2.58
6.2.16
6.2.17
6.2.18
Label
110
111
130
076
136
247
112
103
166
174
165
273
125
260
Sig. Bits
20
20
17
20
18
18
15
15
15
15
15
19
19
19
Range
±180 Degrees
±180 Degrees
16 nm
±131,072 FT
32768 ft
16 nm
±4096 Knots
±180 Degrees
±4096 Knots
±4096 Knots
±32768 fpm
Discrete Wd
Discrete Wd
Discrete Wd
Signal Type
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Resolution
0.00017166137695
0.00017166137695
0.00012207
0.125
0.125
0.000061035
0.125
0.0054931640625
0.125
0.125
1
n/a
0.1 min
1 day
*Rate (ms)
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
Notes:
*
Slowest acceptable update rate in milliseconds.
** This label is not required. Data used if present
Table 5.3.3-1: Position Input Type 1 (Low Speed ARINC 743 GPS)
CHANNEL
429RX_4
CONNECT TO: GPS (ARINC 743)
Format: ARINC 429 (Low Speed)
Fault Designation: GPS BUS
Bus Type: Basic
A = J2-25
B = J2-8
Data
Latitude - Normal
Longitude - Normal
GPS Hor. Int. Limit
Altitude
VDOP
HDOP
Ground Speed
True Track Angle
North/South Velocity
East/West Velocity
Vertical Velocity
Sensor Status
**UTC
**Date
Reference
6.2.7
6.2.8
6.2.5
6.2.4
6.2.15
6.2.12
6.2.6
6.2.9
6.2.53
6.2.54
6.2.58
6.2.16
6.2.17
6.2.18
Label
110
111
130
076
102
101
112
103
166
174
165
273
125
260
Sig. Bits
20
20
17
20
15
15
15
15
15
15
15
19
19
19
Range
±180 Degrees
±180 Degrees
16 nm
±131,072 FT
1024
1024
±4096 Knots
±180 Degrees
±4096 Knots
±4096 Knots
±32768 fpm
Discrete Wd
Discrete Wd
Discrete Wd
Signal Type
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Resolution
0.00017166137695
0.00017166137695
0.00012207
0.125
0.03125
0.03125
0.125
0.0054931640625
0.125
0.125
1
n/a
0.1 min
1 day
*Rate (ms)
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
Notes:
*
Slowest acceptable update rate in milliseconds.
** This label is not required. Data used if present
Table 5.3.3-2: Position Input Type 2 (Internal GPS)
CHANNEL
Internal GPS
Fault Designation: INTERNAL GPS
Bus Type: Basic
Data
Latitude
Longitude
HP Error
Altitude
VP Error
Ground Speed
True Track Angle
East Velocity
North Velocity
Vertical Velocity
GPS State
Integrity State
Error Status
Reference
6.4.1
6.4.1
6.4.1
6.4.2
6.4.2
6.4.3
6.4.3
6.4.4
6.4.4
6.4.4
6.4.5
6.4.5
6.4.5
ID/byte
15/1-4
15/5-8
15/9-12
16/1-4
16/5-8
17/1-4
17/5-8
18/1-4
18/5-8
18/9-12
1C/0
1C/1
1C/6-7
Sig. Bits
32
32
32
32
32
32
32
32
32
32
8
8
8
Range
±180 Degrees
±180 Degrees
meters
meters
meters
meters/sec
360 Degrees
meters/sec
meters/sec
meters/sec
Discrete Wd
Discrete Wd
Discrete Wd
Signal Type
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Basic
Resolution
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
real single-precision
n/a
n/a
n/a
*Rate (ms)
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
1000
Notes:
*
Slowest acceptable update rate in milliseconds.
1.
"MSL" reference must be selected when an internal GPS is utilized. Refer to Table 5.3.7