AMETEK ASD Series User Manual
Page 81
Sorensen ASD Series
Programming: Digital Interface Control
M551177-01 Rev A
4-23
For more information about the configuration of the Ethernet/IP interface,
please refer to the NET485-EIP-MB user manual at Gridconnect website.
4.5.4 ETHERCAT INTERFACE
EtherCAT (Ethernet for Control Automation Technology) is an open high
performance Ethernet-based fieldbus system. The development goal of
EtherCAT was to apply Ethernet to automation applications which require
short data update times (also called cycle times) with low communication
jitter (for synchronization purposes) and low hardware costs.
ASD power supplies have an optional EtherCAT interface that allows
accessing most of the read and writing registers. The registers that are
available are the following:
These write and read registers are linked to EtherCAT PDOs (Process
Data Objects), which allow real time control of the power supply.
Available PDOs are shown in Table 4-14
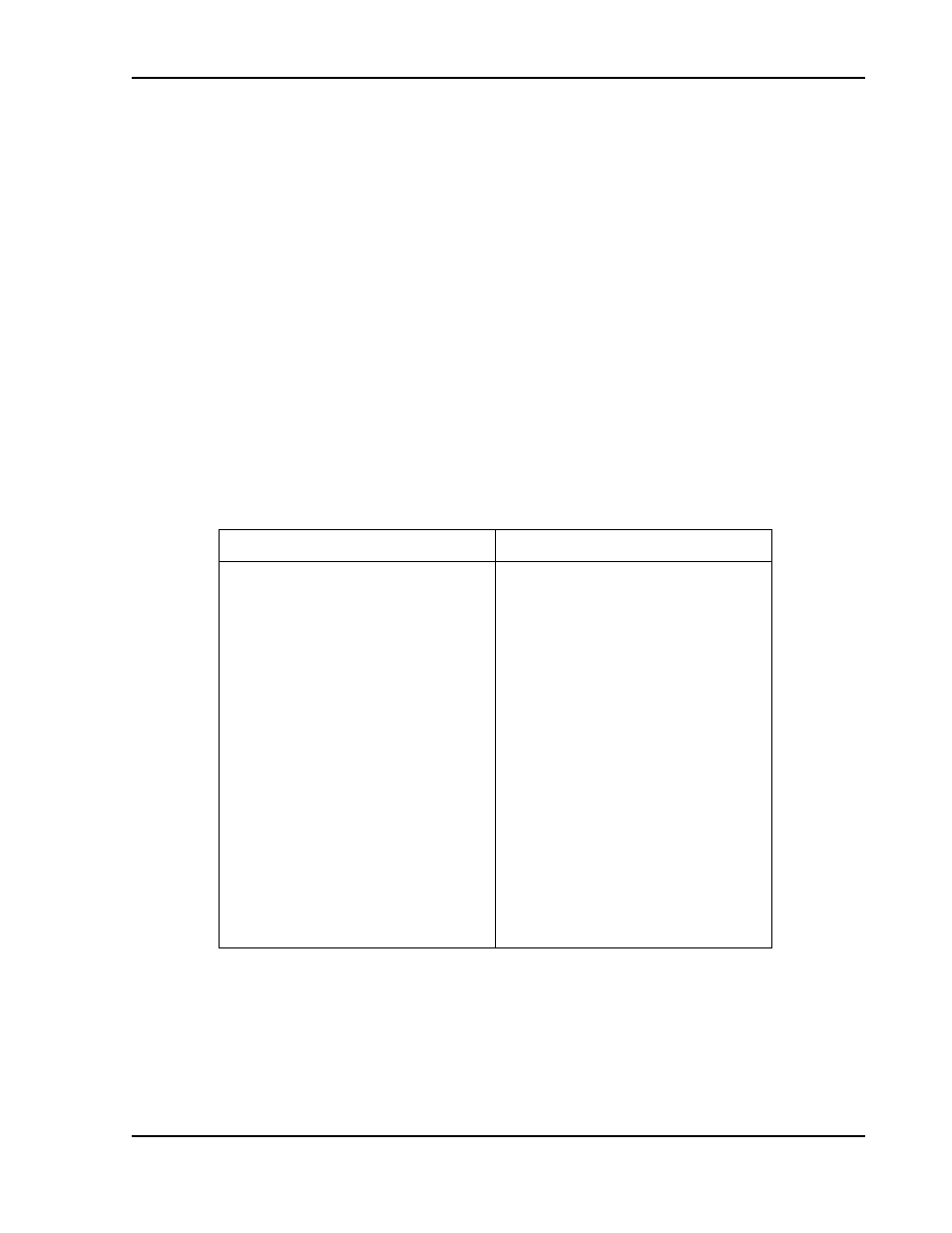
Table 4-14. Registers Available at the EtherCAT Interface
Write Registers
Read Registers
Command
Vsetpoint
Isetpoint
Psetpoint
Status
Fault_Bits
Vmonitor
Imonitor
Pmonitor
Existing_Modules
Active_Modules
Module_Status
Module_Faults
Module_Warnings
Z_Output
Z_Cable
Vdrop_Cable
Energy_Meter
In units with an EtherCAT interface, an auxiliary Modbus-RTU (over RS-
485) interface is available at the DB9 port, which supports the full
functionality and features are available at the other Modbus interfaces.
This auxiliary interface can be used together with EtherCAT for non “real-
time co
ntrol” tasks, such as configuration, register saving, module query
and firmware update. If both interfaces are used at the same time, the
EtherCAT interface has more priority to write registers.