Media independent interface (mii) – Maxim Integrated High-Speed Microcontroller Users Guide: Network Microcontroller Supplement User Manual
Page 174
High-Speed Microcontroller User’s
Guide: Network Microcontroller
Supplement
174
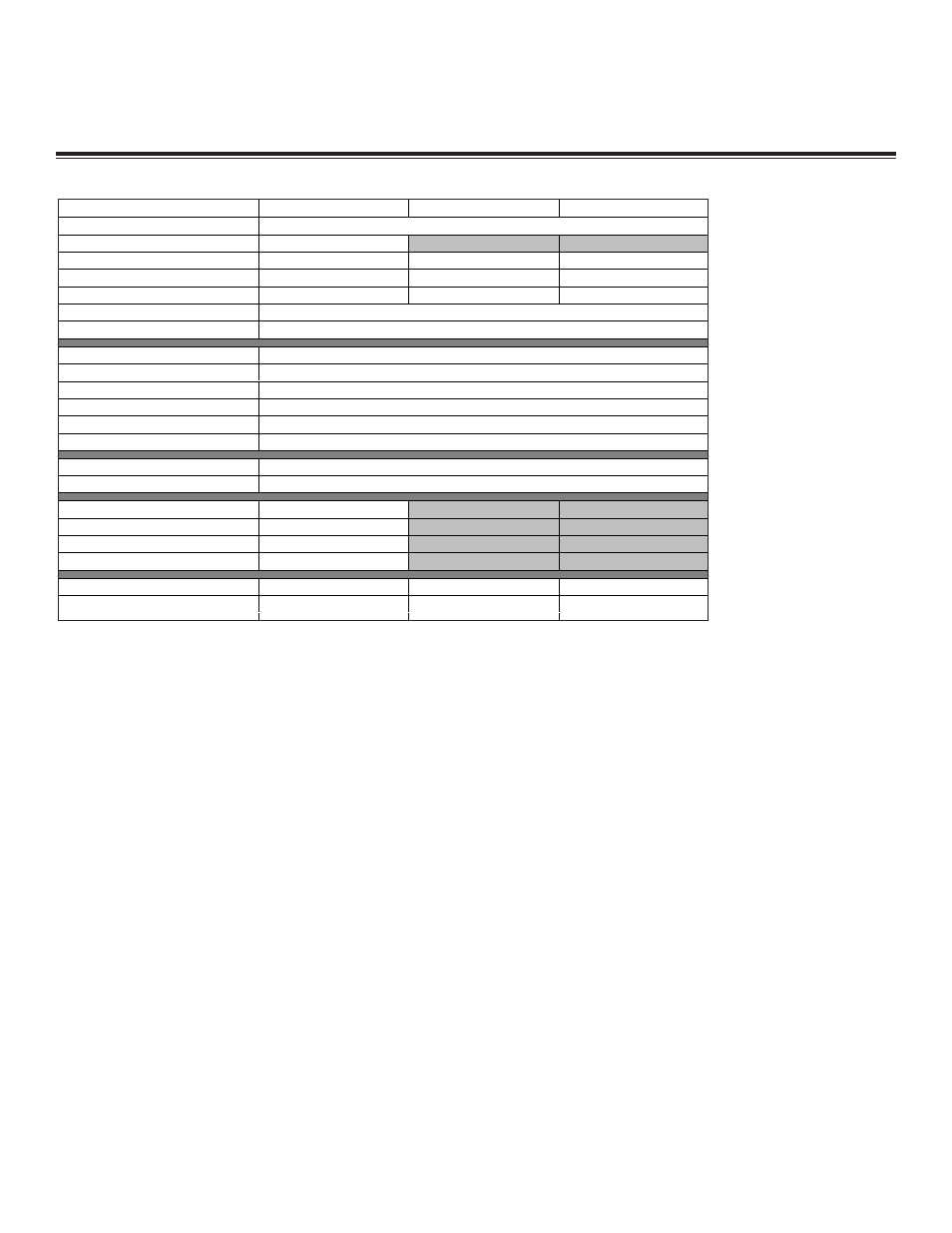
Table 22-2. MAC Control Register Bit Summary
MEDIA INDEPENDENT INTERFACE (MII)
The DS80C400 fully supports the media-independent interface according to the IEEE 802.3 standard. The MII interface provides inde-
pendent transmit and receive datapaths, as well as input signals for monitoring network status. All standard PHY controller chips can
use this default 4-bit parallel interface for connection to the Ethernet cable.
The transmit interface is composed of TXCLK, TX_EN, and TXD[3:0]. The TXCLK input is the transmit clock provided by the PHY. For
10Mbps operation, the transmit clock (TXCLK) should be run at 2.5MHz. For 100Mbps, TXCLK should be run at 25MHz. The TXD[3:0]
outputs provide the 4-bit (nibble) data bus for transmitting frame data to the external PHY. Each transmission begins when the TX_EN
output is driven active-high, indicating to the PHY that valid data is present on the TXD[3:0] bus.
The receive interface is comprised of RXCLK, RX_DV, RX_ER, and RXD[3:0]. The RXCLK input is the receive clock provided by the
external PHY. This clock (RXCLK) should be run at 2.5MHz for 10Mbps operation and at 25MHz for 100Mbps operation. The RXD[3:0]
inputs serve as the 4-bit (nibble) data bus for receiving frame data from the external PHY. The reception begins when the external PHY
drives the RX_DV input high, signaling that valid data is present on the RXD[3:0] bus. During reception of a frame (RX_DV = 1), the
RX_ER input indicates whether the external PHY has detected an error in the current frame. The RX_ER input is ignored when not receiv-
ing a frame (RX_DV = 0).
The MII also monitors two network status signals that are provided by the external PHY. The carrier sense (CRS) input is used to assess
when the physical media is idle. The collision detect (COL) input is required for half-duplex operation to signal when a collision has
occurred on the physical media. Figure 22-2 shows a full MII interface. Data transactions between the MAC and the external PHY are
done least significant nibble first as shown in Figure 22-3.
OPERATIONAL MODE ==>
HALF-DUPLEX
FULL-DUPLEX
LOOPBACK
Bit 27: Port select
0 = MII, 1 = ENDEC
Bit 28: Heartbeat disable
User-selectable ENDEC only
Invalid–set to 1
Invalid–set to 1
Bit 23: Disable receive own
1
0
0
Bits 22-21: Loopback operating mode
00
00
01 or 10
Bit 20: Full-duplex mode
0
1
1
Bit 3: Transmitter enable
MAC transmitter enable
Bit 2: Receiver enable
MAC receiver enable
Bit 31: Receive all
Address-filtering control
Bit 19: Pass all multicast
Address-filtering control
Bit 18: Promiscuous
Address-filtering control
Bit 17: Inverse filtering
Address-filtering control
Bit 15: Hash only
Address-filtering control
Bit 13: Hash/perfect filtering
Address-filtering control
Bit 16: Pass bad frames
Packet-filtering control
Bit 11: Disable broadcast frames
Packet-filtering control
Bit 12: Late collision control
CSMA/CD
Invalid–set to 0
Invalid–set to 0
Bit 10: Disable retry
CSMA/CD
Invalid–set to 0
Invalid–set to 0
Bits 7-6: Back-off limit
CSMA/CD
Invalid–set to 00
Invalid–set to 00
Bit 5: Deferral check
CSMA/CD
Invalid–set to 0
Invalid–set to 0
Bit 30: Endian mode
User-selectable
User-selectable
User-selectable
Bit 8: Automatic pad stripping
User-selectable
User-selectable
User-selectable
Maxim Integrated