Maxim Integrated High-Speed Microcontroller Users Guide: Network Microcontroller Supplement User Manual
Page 151
High-Speed Microcontroller User’s
Guide: Network Microcontroller
Supplement
151
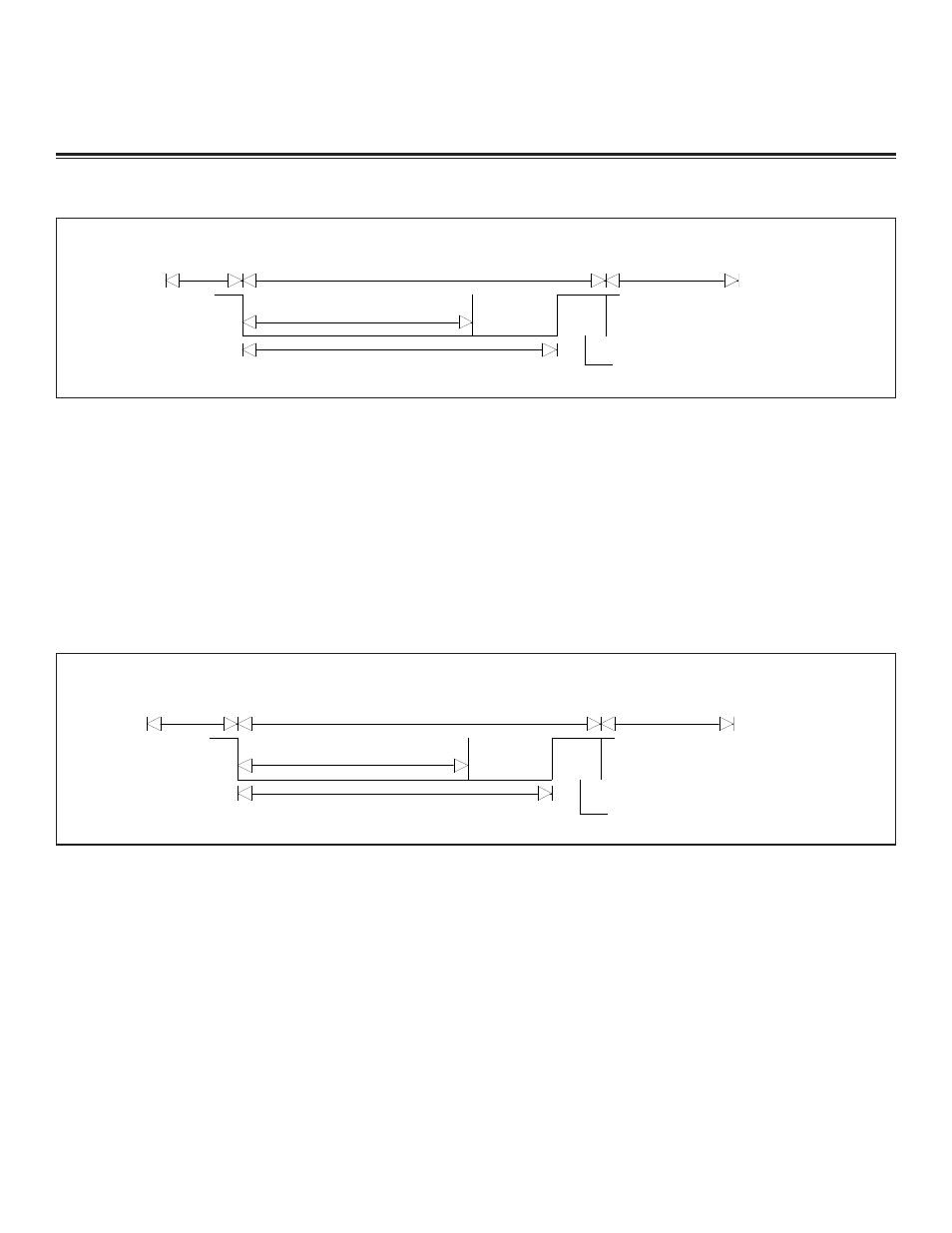
Error frame: The error frame is transmitted by a CAN controller when the CAN processor detects a bus error. The error frame is
composed of two different fields. These are 1) the superposition of the error flags from different nodes and 2) the error delimiter.
Figure 19-8. Error Frame
The error frame is composed of 6 dominant bits, which violates the CAN specification bit-stuffing rule. If either of the CAN processors
detects an error condition, that CAN processor transmits an error frame. When this happens, all nodes on the bus detect the bit stuff
error condition and transmit their own error frame. The superpositioning of all of these error frames leads to a total error frame length
between 6 and 12 bits, depending on the response time and number of nodes in the system. Any messages (data or remote frame)
received by the CAN processors (successful or not) that are followed by an error frame are discarded. After the transmission of an error
flag, each CAN processor sends an error delimiter (8 recessive bits) and monitors the bus until it detects the change from the domi-
nant to recessive bit level. The CAN modules issues an error frame each time an error frame is detected. Following a series of error
frames, the CAN modules enter into an error-passive mode. In the error-passive mode, the CAN processors transmit 6 recessive bits
and wait until 6 equal bits of the same polarity have been detected. At this point, the CAN processor begins the next internal receive
or transmission operation.
Overload frame: The overload frame provides an extra delay between data or remote frames. The overload frame is composed of
two fields: the overload flag and the overload delimiter.
Figure 19-9. Overload Frame
Three conditions lead to the transmission of an overload flag:
1) The internal conditions of a CAN receiver require a delay before the next data or remote frame is sent. The DS80C400 CAN con-
troller is designed to prevent this condition for data rates at or below the 1MB per second data rate.
2) The CAN processor detects a dominant bit at the first and second bit positions of the intermission.
3) If the CAN processor detects a dominant bit at the eighth bit of an error delimiter or overload delimiter, it starts transmitting an over-
load frame.
Error Frame
Superposition of Error Flags from other nodes
Interframe Space
or Overload Frame
Data Frame
Error Flag
Error Delimiter
Overload Frame
Superposition of Overload Flags from other nodes
Interframe Space
or Overload Frame
End of Frame or
Error Delimiter or
Overload Delimiter
Overload Flag
Overload Delimiter
Maxim Integrated