Can 0 bus timing register 0 (c0bt0) – Maxim Integrated High-Speed Microcontroller Users Guide: Network Microcontroller Supplement User Manual
Page 140
High-Speed Microcontroller User’s
Guide: Network Microcontroller
Supplement
140
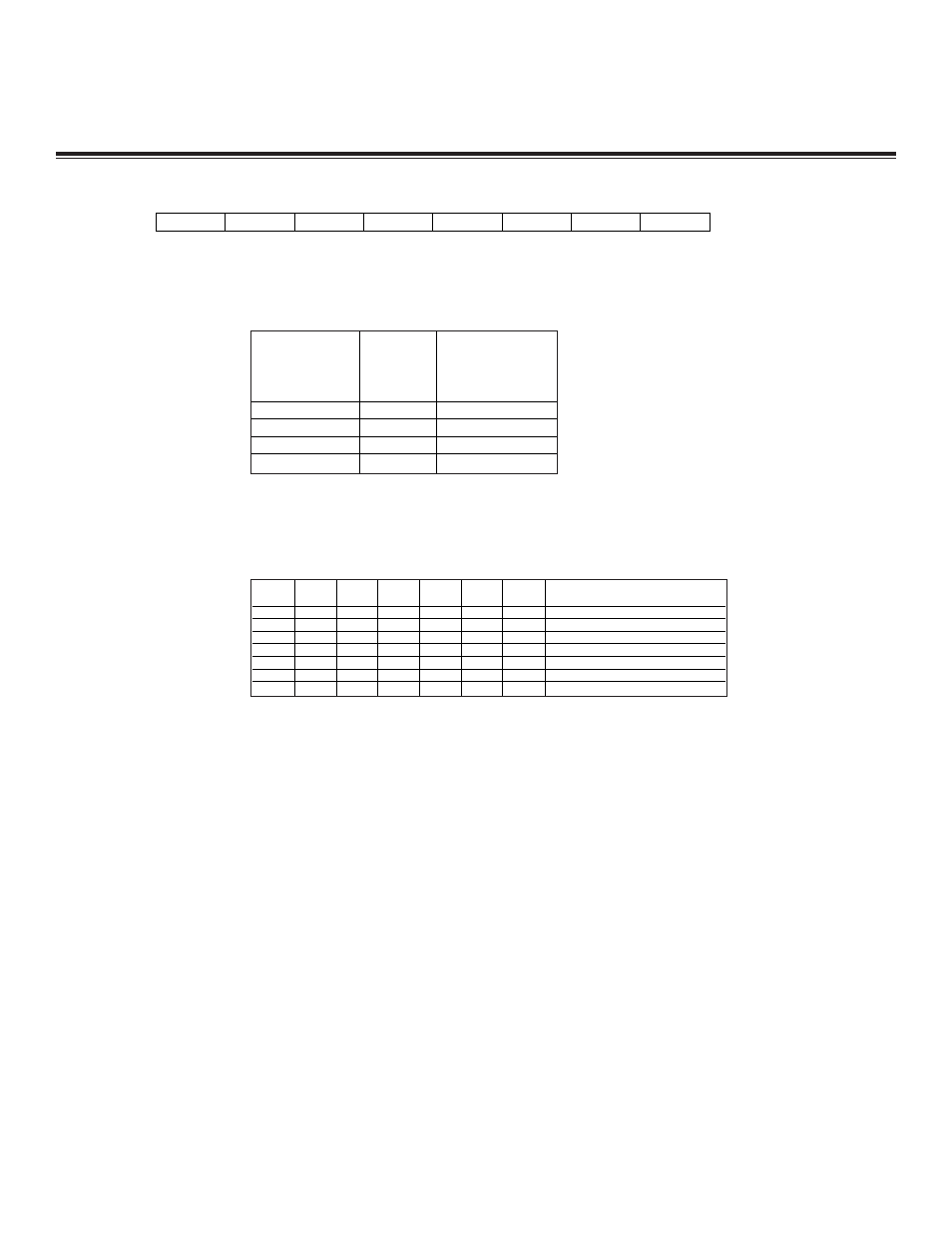
SJW1, SJW0
Bits 7–6
CAN synchronization jump width select. These bits specify the maximum number of time quanta (t
qu
)
cycles that a bit can be lengthened or shortened in one resynchronization to compensate for phase
errors detected by the CAN controller when receiving data. These bits can be modified only during a
software initialization (SWINT = 1).
SJW1
SJW0
SYNCHRONIZATION
JUMP WIDTH
(Number in parentheses
is SJW value used in bit
timing calculations)
0
0
1 t
qu
(1)
0
1
2 t
qu
(2)
1
0
3 t
qu
(3)
1
1
4 t
qu
(4)
BPR5–BPR0
Bits 5–0
CAN baud-rate prescaler. These bits specify the lower 6 bits (BPR5–BPR0) of the 8-bit prescale value
(BPR7–BPR0). The 256 states defined by the binary combinations of the BPR7–BPR0 bits determine the
value of the prescale that, in turn, defines the cycle time associated with one-time quanta. These bits
can be modified only during a software initialization (SWINT = 1). The BPR7, BPR6 bits are located in
the COR (CEh) SFR.
BPR7,
BPR6
BPR5
BPR4
BPR3
BPR2
BPR1
BPR0
BAUD-RATE PRESCALE VALUE
(BRPV)
00
0
0
0
0
0
0
1
00
0
0
0
0
0
1
2
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
—
11
1
1
1
1
1
0
255
11
1
1
1
1
1
1
256
CAN 0 Bus Timing Register 0 (C0BT0)
MOVX Address
1
7
6
5
4
3
2
1
0
xxxx04h
SJW1
SJW0
BPR5
BPR4
BPR3
BPR2
BPR1
BPR0
Maxim Integrated