Input assembly address 24 to 51, Statistics information -17 – KEYENCE IV Series User Manual
Page 39
3-17
- IV Series User’s Manual (Field Network) -
Data allocation in the cyclic communication
z
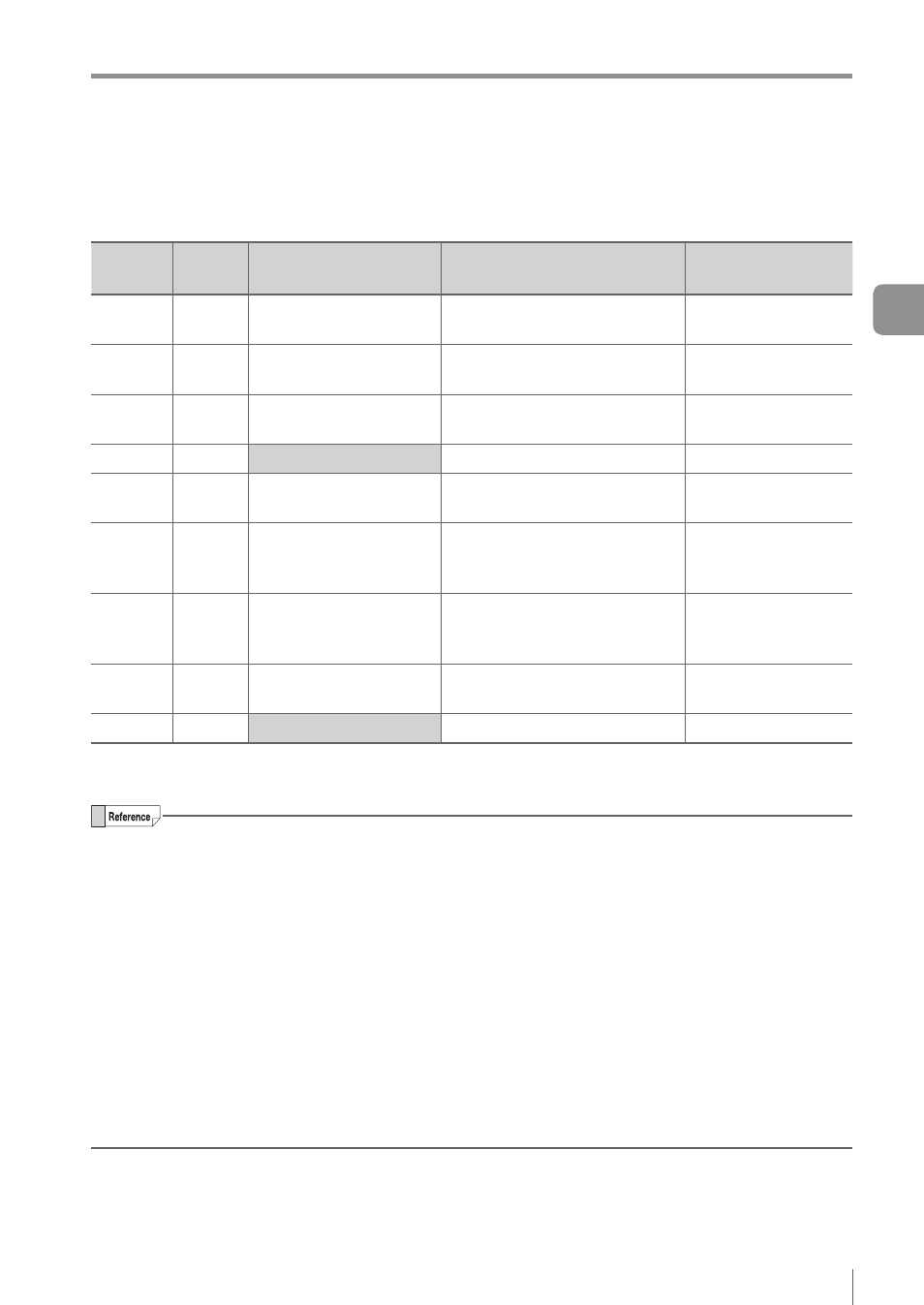
Input Assembly Address 24 to 51: Statistics information
The Bits at Address 24 to 51 of the Input Assembly have the following functions:
Address
Data
type*
Item
Content
Data content
24 to 25
UINT
Processing time MAX
Displays the maximum
processing time value.
0 to 10000
26 to 27
UINT
Processing time MIN
Displays the minimum
processing time value.
0 to 10000
28 to 29
UINT
Processing time AVE
Displays the average processing
time value.
0 to 10000
30 to 31
---
Reserved by system
---
---
32 to 35
UDINT Number of triggers
Displays the total number of
triggers issued.
0-999999999
36 to 39
UDINT Number of OKs
Displays the total number of
triggers issued whose overall
status result was “OK”.
0-999999999
40 to 43
UDINT Number of NGs
Displays the total number of
triggers issued whose overall
status result was “NG”.
0-999999999
44 to 47
UDINT Number of trigger errors Number of triggers issued that
generated a trigger error
0-999999999
48 to 51
---
Reserved by system
---
---
* UINT : Unsigned 16-bit integer
UDINT : Unsigned 32-bit integer
y
The unit of processing time is msec.
y
The maximum number of triggers is 999999999. If the maximum value is exceeded, it will go back to 0
and start counting up again.
y
The maximum value for the number of OK triggers, number of NG triggers, and the number of trigger
errors is 999999999. The value will stop updating when the upper limit value is reached.
y
A reset will occur in the following conditions:
y
When [Statistics reset] is input
y
When a tool is added/deleted/copied
y
When the enable/disable status of the upper threshold value for the color area/area tool or the setting
scale has been changed via user operation or tool auto-tuning
y
When a tool auto-tuning is started with two or more tools other than the position correction tool set
y
When the sensor is switched OFF
y
When the program is switched
y
When a correction for the sensor is started
y
When the sensor is initialized
3
Cyclic communication