Position offset position loop output limits, Position offset, Position loop output limits – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 94
94
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
Parameter 13 [Spd Ref2 Multi] is calculated:
Notice that the encoder PPRs should not be included in the calculation for
[Spd Ref2 Multi]. [Spd Ref2 Multi] is rounded to the 4th decimal place.
The position loop gear ratios will be exact, so that the follower tracks at 4
times the master's speed.
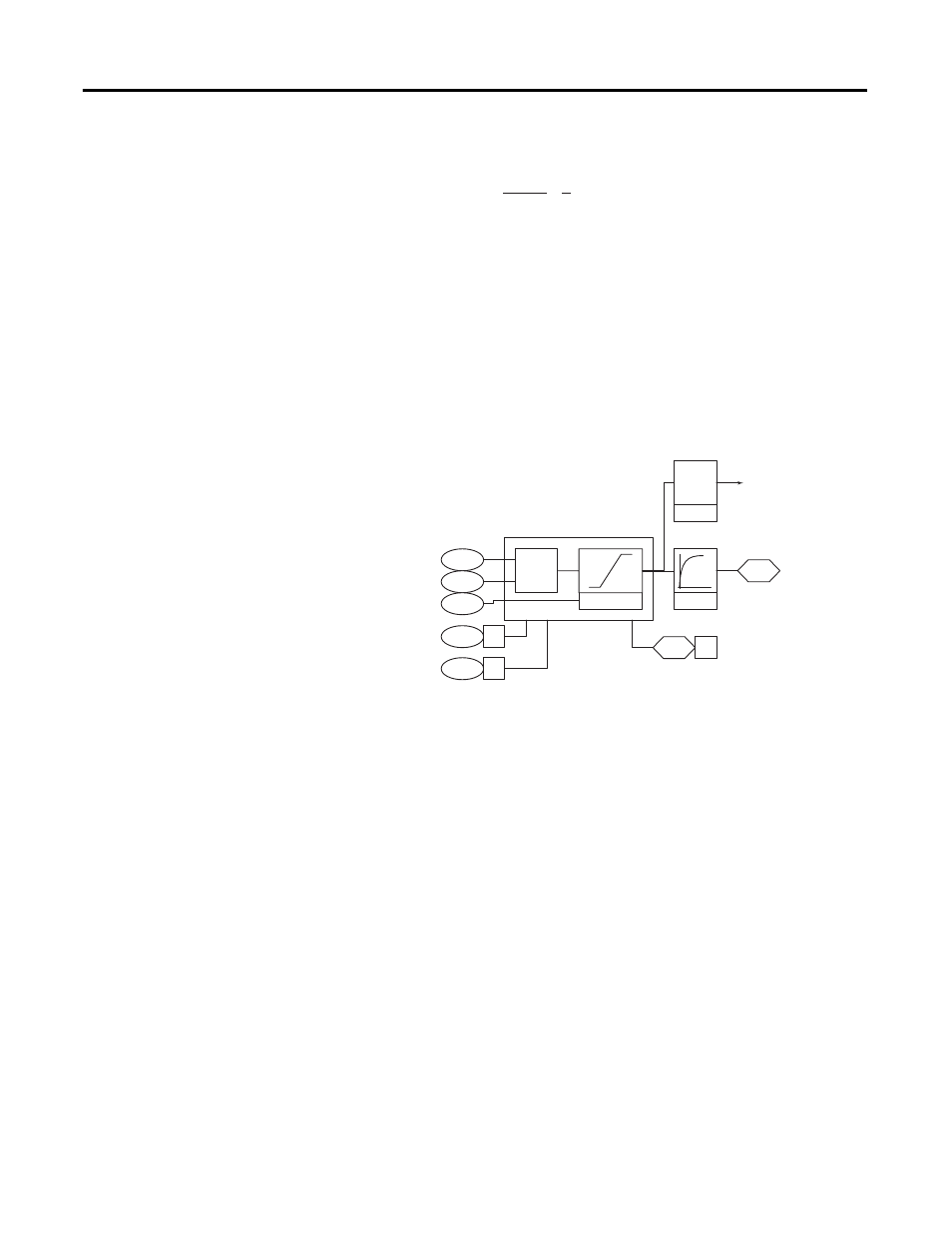
Position Offset
Offsets can be added to the position reference. Offsets are used to make a
correction move to synchronize the follower to the master position.
There are two offsets, parameters 753 [Posit Offset 1] and 754 [Posit Offset 2].
The offset speed must be entered in parameter 755 [Posit Offset Spd] - if this is
left at zero the move will not occur. The position offset must be entered in counts
of feedback because it is added to the position reference after the EGR scaling.
Offsets must be maintained to keep the position. In other words, if you enter 300
in the offset, the position loop will move 300 counts extra. If you zero the offset
command, the motor will return to the previous position. When it is necessary to
zero the offset after a move without returning to the previous position, set
parameter 740 [Position Control], bit 5 “XOff ReRef ” =1. Then set the offset
value = 0. Then set [Position Control], bit 5 “XOff ReRef ” = 0. The system will
not make an offset move when bit 5 of [Position Control] is on.
Position Loop Output Limits
Parameter 775 [XReg Spd LoLim] sets the negative speed limit at which the
position regulator will output. The default is set to -10% of the base motor speed.
4
1
4
]
Multi
Ref2
Spd
[
=
=
=
Ratiom
Ratiof
+
Rate Lim
753
754
755
LPass
Filter
756
Posit Offset 1
Added to Position
Reference After EGR
Posit Offset 2
Posit Offset Spd
Position Control
(X Offset Pol)
Position Control
(X Offset Ref)
Deriv
Δ
740
04
740
05
741
05
Position Status
(XOffRRef Act)
X Offst SpdFilt