Motor control mode, Field oriented control – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 69
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
69
Detailed Drive Operation Chapter 1
Motor Control Mode
Parameter 485 [Motor Ctrl Mode] selects the type of motor control to use. This
parameter is set during the HIM assisted startup when asked to select the motor
control mode. The settings for Parameter 485 [Motor Ctrl Mode] are
• 0 “FOC” selects field oriented control. Field oriented control is used with
AC squirrel cage induction motors for high performance.
• 1 “FOC 2” selects field oriented control and is only used for a specific type
of AC induction motor with motor thermal feedback. Note: This option
is used only for motors manufactured by Reliance Electric - Japan.
• 2 “PMag Motor” selects control for permanent magnet motors.
• 3 “V/Hz” selects volts per hertz control. This selection is available in
v2.003 and later.
• 4 “Test” puts the drive in a test mode to perform the direction test. “Test” is
automatically selected during the direction test portion of the Start-Up
routine and does not need to be set manually by the user.
Field Oriented Control, Permanent Magnet Motor Control, and Volts/Hertz
Control are described in further detail below.
Field Oriented Control
Field oriented control is used with AC squirrel cage induction motors for high
performance. Motor data and an autotune is required for correct operation in this
mode (refer to
for details). Field oriented control is selected
by setting parameter 485 [Motor Ctrl Mode] = 0 “FOC”.
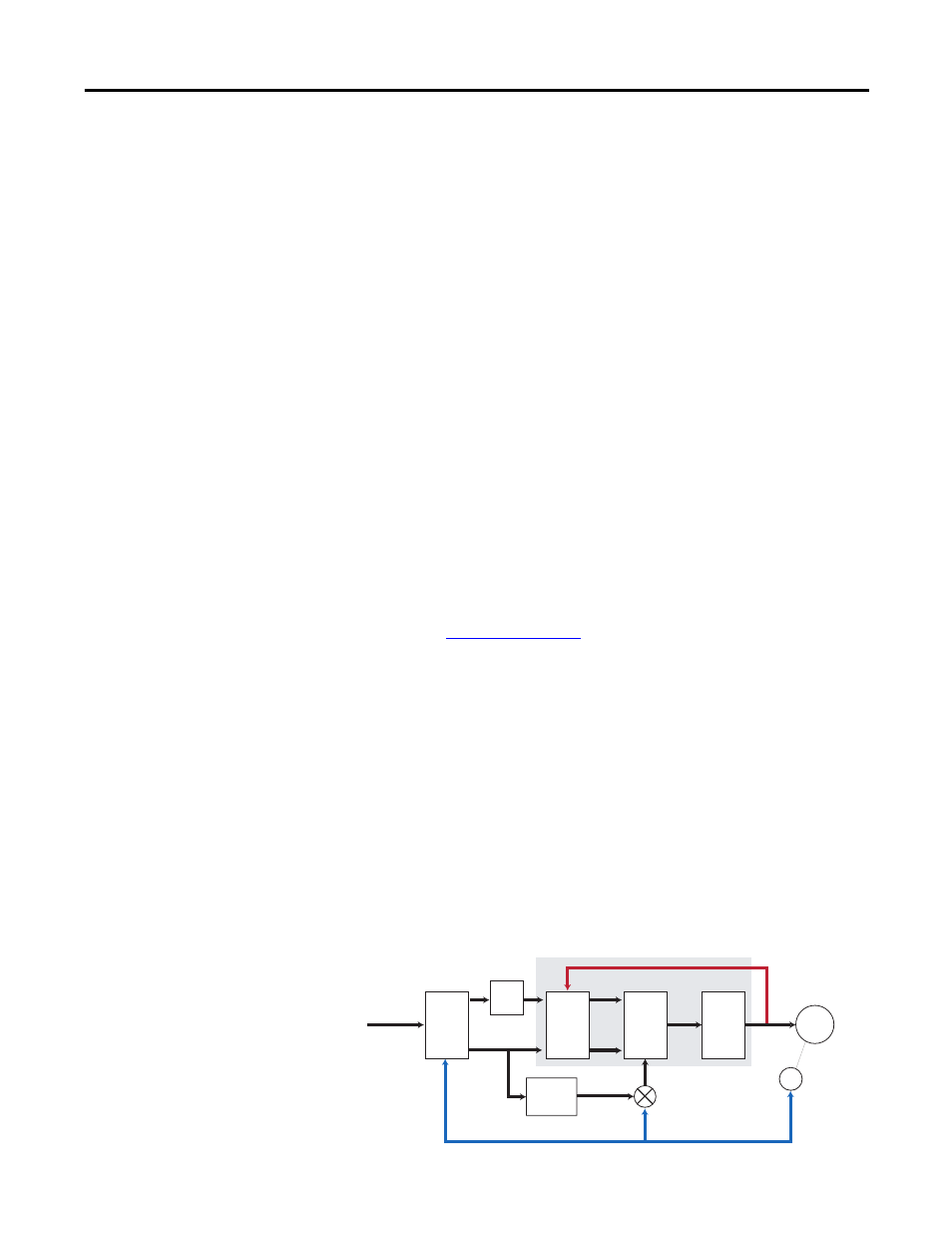
In field oriented control, the drive takes the speed reference that is specified by
the Speed Reference Selection block and compares it to the speed feedback. The
speed regulator uses Proportional and Integral gains to adjust the torque
reference for the motor. This torque reference attempts to operate the motor at
the specified speed. The torque reference is then converted to the torque
producing component of the motor current.
This type of speed regulator produces a high bandwidth response to speed
command and load changes. In field oriented control the flux and torque
producing currents are independently controlled. Therefore, you can send a
torque reference directly instead of a speed reference. The independent flux
control also allows you to reduce the flux in order to run above base motor speed.
Adaptive
Controller
High Bandwidth Current Regulator
SPEED REF.
TORQUE REF.
SLIP
SPEED FEEDBACK
CURRENT FEEDBACK
AUTOTUNE PARAMETERS
V mag
V ang
Current
Reg.
Speed
Reg.
Flux
Reg.
Voltage
Control
Inverter
Motor
Encoder