Droop, Dynamic braking, Efficiency – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 47: Droop dynamic braking efficiency
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
47
Detailed Drive Operation Chapter 1
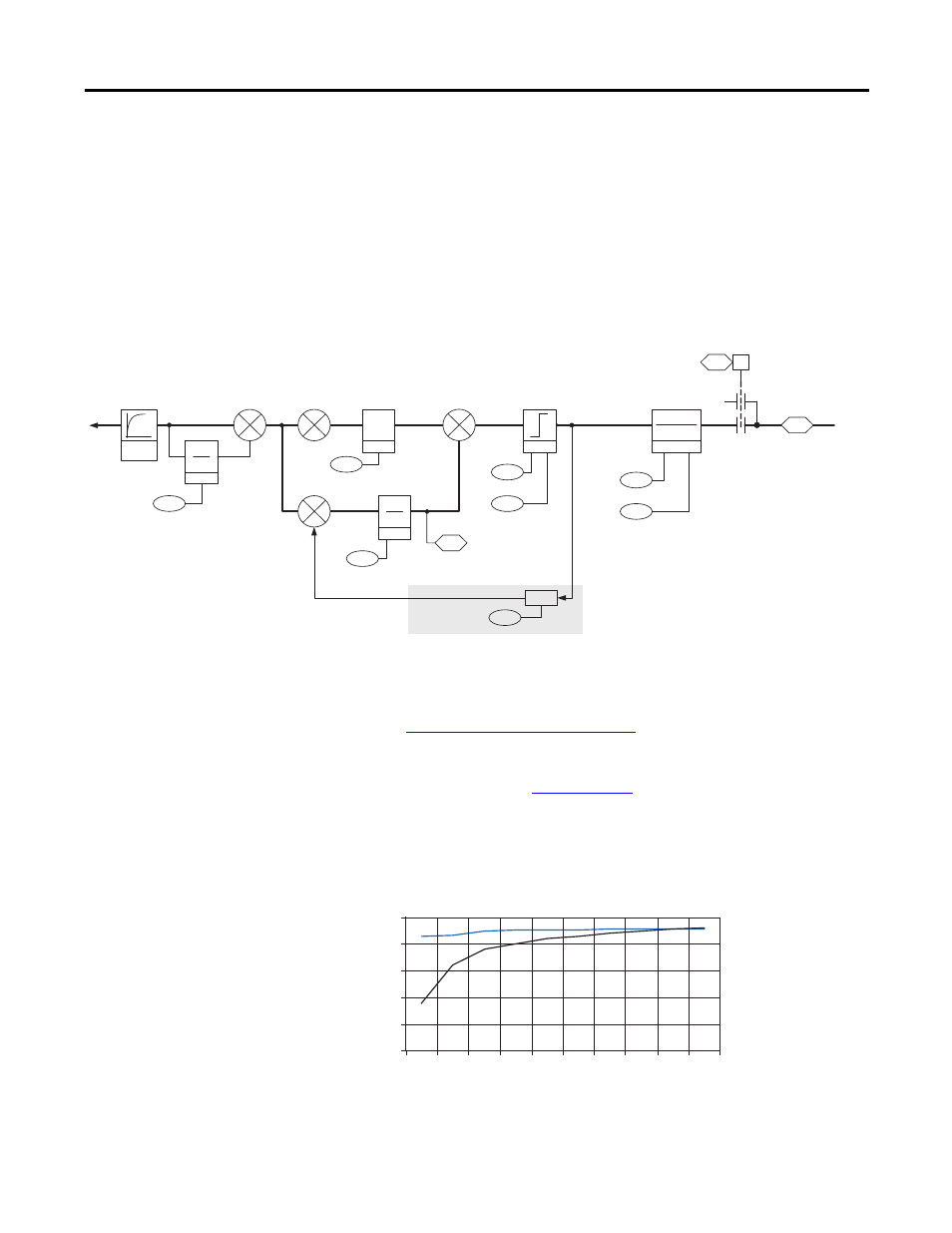
Droop
Droop is used to “shed” load and is usually used when a soft coupling of two
motors is present in an application. The master drive speed regulates and the
follower uses droop so it does not “fight” the master. The input to the droop
block comes from the torque output of the speed regulator before limiting. The
output of the droop block reduces the speed reference. Parameter 86 [Spd Reg
Droop] sets the amount of base motor speed that the speed reference is reduced
by when at full load torque. [Spd Reg Droop] is in units of per unit torque/per
unit speed. For example, when [Spd Reg Droop] is set to 0.1 and the drive is
running at 100% rated motor torque, the droop block would subtract 10% from
the speed reference.
Dynamic Braking
Refer to
Bus Regulation/Braking on page 22
.
For resistor sizing, refer to the
PowerFlex Dynamic Braking Resistor Calculator
Selection Guide, publication
Efficiency
The following chart shows typical efficiency for PWM variable frequency drives,
regardless of size. Drives are most efficient at full load and full speed.
85
81
82
102
103
95
96
0
86
Droop
101
302
ServoLck
ks
s
P Gain
kp
Limit
Spd Reg P Gain*
Spd Reg I Gain*
Spd Reg Pos Lim
Spd Reg Neg Lim
Spd Reg Droop
0
1
SRegOut FiltGain
SReg Out Filt BW
Logic Ctrl State
(Spd Reg En)
Spd Reg PI Out
to Torque Control
[7A3]
2
nd
Order
LPass
Filter
SpdReg Integ Out
Lead Lag
(kn * s)+ wn
s + wn
+
+
-
+
+
+
+
-
157
08
I Gain
ki
s
10
20
30
40
50
60
70
80
90
100
% Speed/% Load
% Efficiency
vs. Speed
vs. Load
75
80
85
90
95
100