Torque regulation mode – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 164
164
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
Torque Regulation Mode
A torque regulated application can be described as any process requiring some
tension control. An example is a winder or unwinder with material being “drawn”
or pulled with a specific tension required. The process also requires that another
element set the speed. Configuring the drive for torque regulation requires
parameter 110 [Speed/TorqueMode] to be set to 2 “Torque Ref ”. In addition, a
reference signal must be linked to the torque reference. For example, when analog
input 1 is used for the reference, link parameter 111 [Torque Ref1] to parameter
800 [Anlg In1 Data].
When operating in a torque mode, the motor current will be adjusted to achieve
the desired torque. If the material being wound/unwound breaks, the load will
decrease dramatically and the motor can potentially go into a “runaway”
condition.
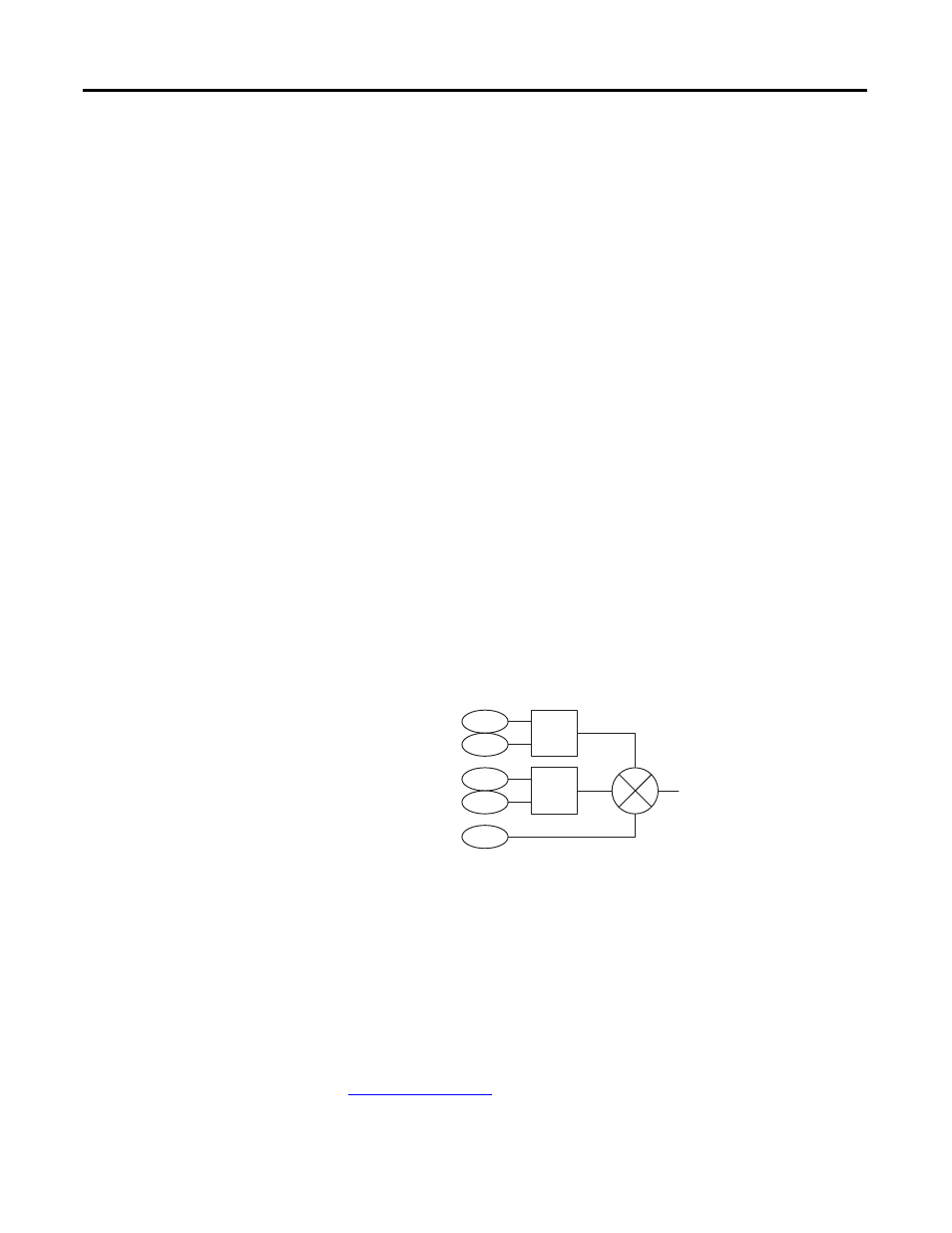
Torque Reference:
Parameter 111 [Torque Ref1] is divided by parameter 112 [Torq Ref1 Div]
Parameter 113 [Torque Ref2] is multiplied by parameter 114 [Torq Ref2 Mult]
Parameter 115 [Torque Trim] can be used to trim the torque. For example,
[Torque Trim] can be linked to an analog input or to the Process PI output.
The final torque reference, in torque mode, is the sum of scaled [Torque Ref1],
scaled [Torque Ref2], and [Torque Trim].
Min Speed / Torque Mode and Max Speed / Torque Mode
This operating mode compares the speed and torque commands. The
algebraically minimum value is used. Instead of operating the drive as a pure
torque regulator, the “runaway” condition can be avoided by limiting the speed. A
winder is a good example for the application of the minimum speed/torque
(“Min Spd/Trq”) operating mode. Maximum speed/torque (“Max Spd/Trq”)
mode would be used if both speed and torque are negative.
illustrates how minimum speed/torque mode operates.
The drive starts out operating as a torque regulator. The torque reference causes
the motor to operate at 308 rpm. The speed reference is 468 rpm, so the
111
X
112
113
114
115
/
+
+
+
Torque Ref 1
Torq Ref1 Div
Torque Ref 2
Torq Ref2 Multi
Torque Trim