Point to point motion planner, Configuration – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 86
86
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
Position Loop - Follower (Electronic Gearing) on page 90
details on setting up the speed and position loop.
• Adjust parameter 730 [PLL LPFilter BW] for the best overall
performance.
Point to Point Motion
Planner
This function allows the drive to execute point to point position moves using a
trapezoidal or S-curve profile. Adjustments can be made to the acceleration,
deceleration and S-curve times.
Configuration
Input and Scaling
The primary input is command position. The input goes immediately through a
scale block whose output is command position with units of encoder counts. The
signal is next sent to the command interpreter for processing.
Control
The command interpreter decides
how and when to act on position input. A set of
control bits set the rules. They are interpreted to mean either move an
absolute
number of counts, or move
incrementally by so many counts.
The command interpreter may be set to wait for an event or to execute the move
immediately. (Executing a move in this context means passing a reference to the
profile generator where it is acted upon now.)
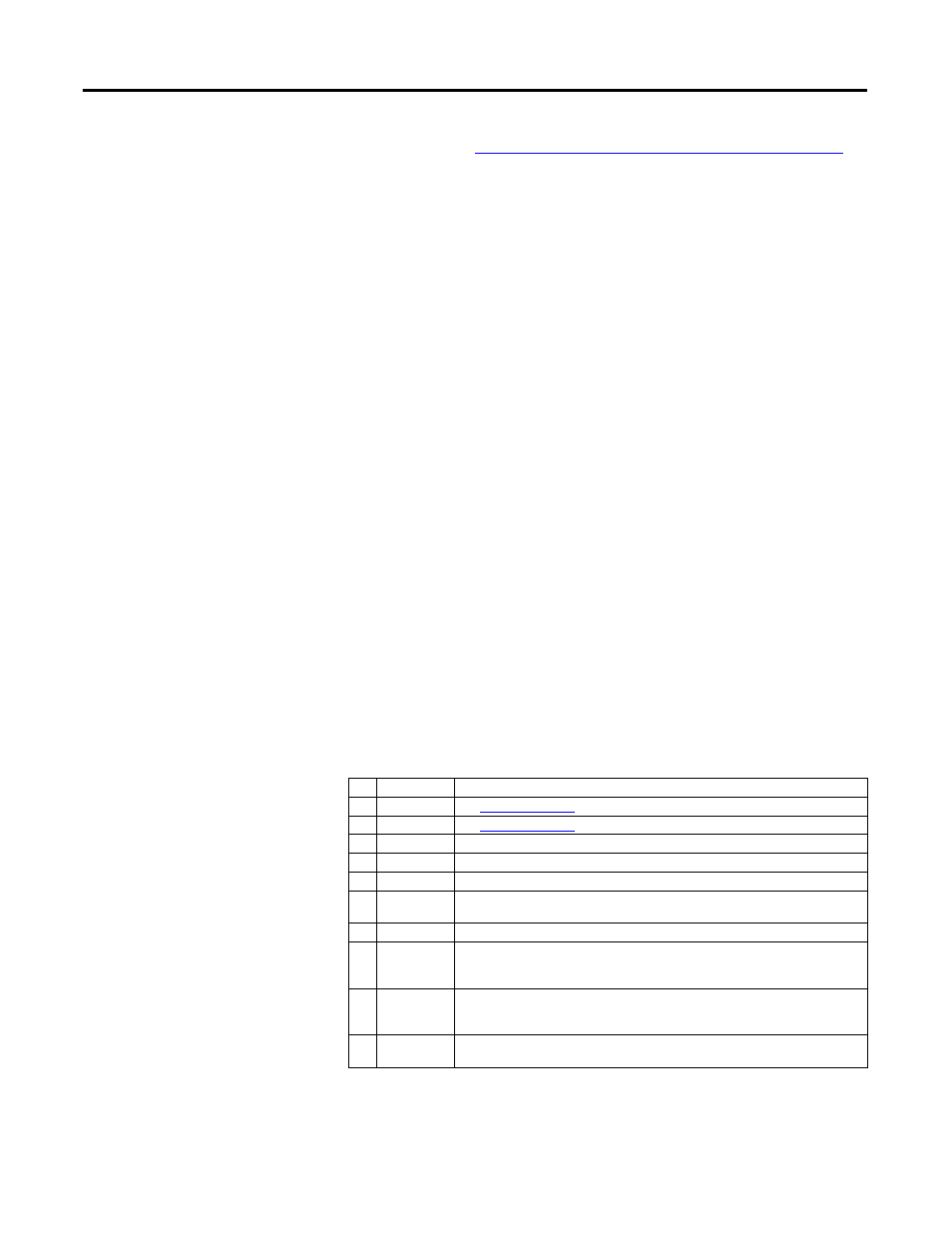
Table 3 - Parameter 1134 [PPMP Control]
Bit Name
Description
0
Absolute
See
.
1
Incremental
See
.
2
Start
Start move. Effected on leading edge only.
3
(Reserved)
Not used.
4
Scaling En
Turns on the input scaling block. Scale block output is in units of encoder counts.
5
Over Ride En
Enable velocity override multiplier. Override is a multiplier to forward and reverse
velocity limits.
6
S Curve En”
Enable “S” curve rounding. “S” curve limits jerk.
7
Cond Hold
Conditional hold freezes the velocity regulator’s integrator if position reference
input changes. This bit is recommended to be set if the profile is without “S”
curve.
8
Pause
Brings the drive to a controlled stop as if it were coming into commanded
position. Releasing Pause will cause the profile generator to resume pursuit of a
target position.
9
Re-Synch
Forces the output position to equal parameter 763 [Position Actual]. Re-sync will
automatically be performed on the leading edge of status RUN.