Advanced tuning for the speed regulator with – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 160
160
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
Advanced Tuning for the Speed Regulator with Gearbox or Belt
When using a system with a gearbox or belts, the backlash or lost motion can
cause instability. However, a feature called inertia adaption can compensate for
backlash or lost motion. Follow the steps below to use inertia adaption:
1.
Identify motor and system inertia (in seconds).
The motor inertia can be determined by performing an inertia test with
the motor uncoupled from the load, or the motor inertia in seconds can be
calculated using the following formula:
where WK
2
is the inertia in lbft
2
, RPM is the base motor speed of the
motor, and T
acc
is the rated torque of the motor in lbft. T
acc
can be
calculated by the following:
where Hp is the nameplate horsepower of the motor and RPM is the base
motor speed of the motor.
System Inertia (parameter 9) is determined by performing the inertia test
with the load coupled, or the value (in seconds) can be calculated using the
formulas above if WK
2
is known for the system.
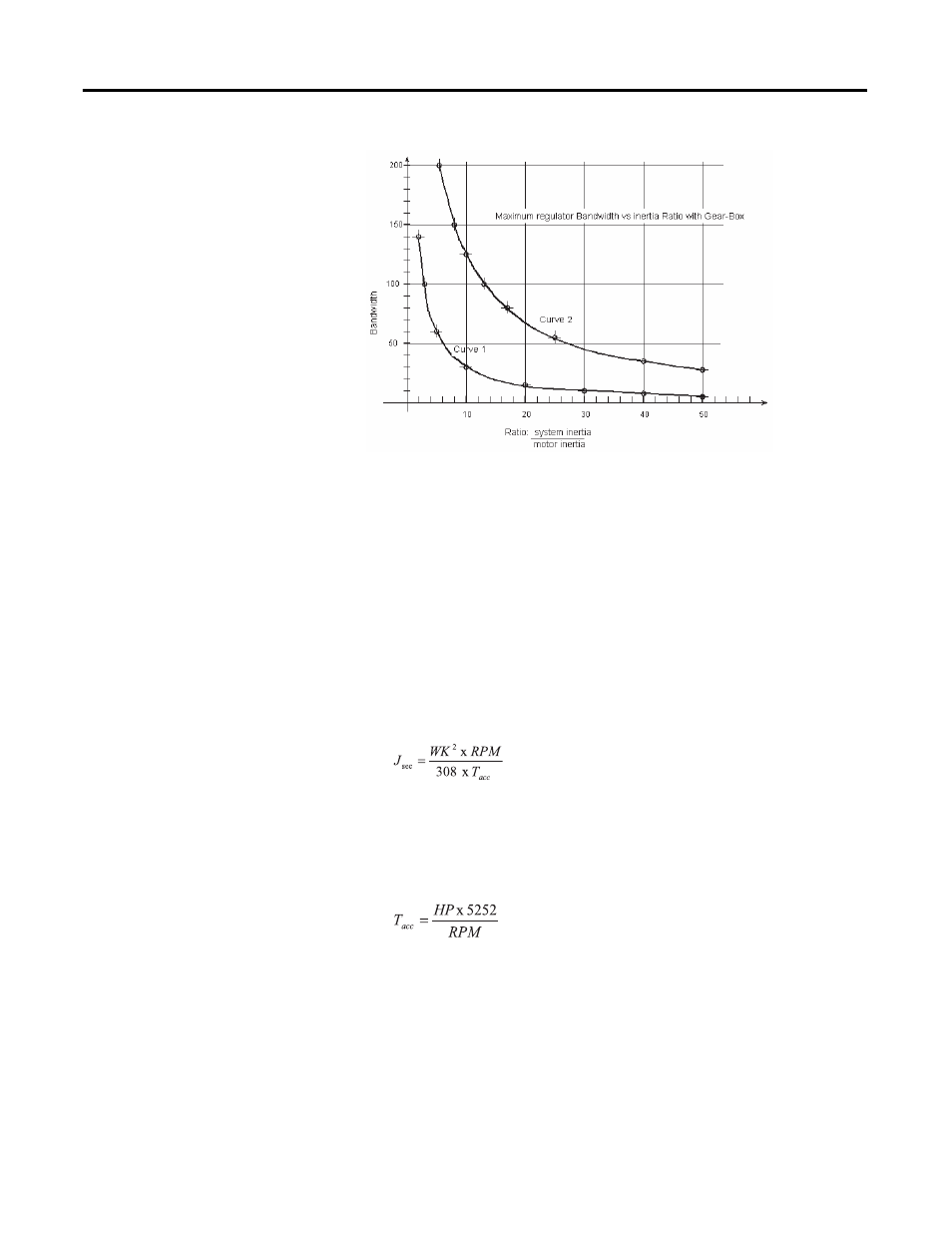
2.
Set parameter 90 [Spd Reg BW]. Do not exceed the bandwidth limit of
curve 2 below (based on the ratio of motor inertia to system inertia).