Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 87
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
87
Detailed Drive Operation Chapter 1
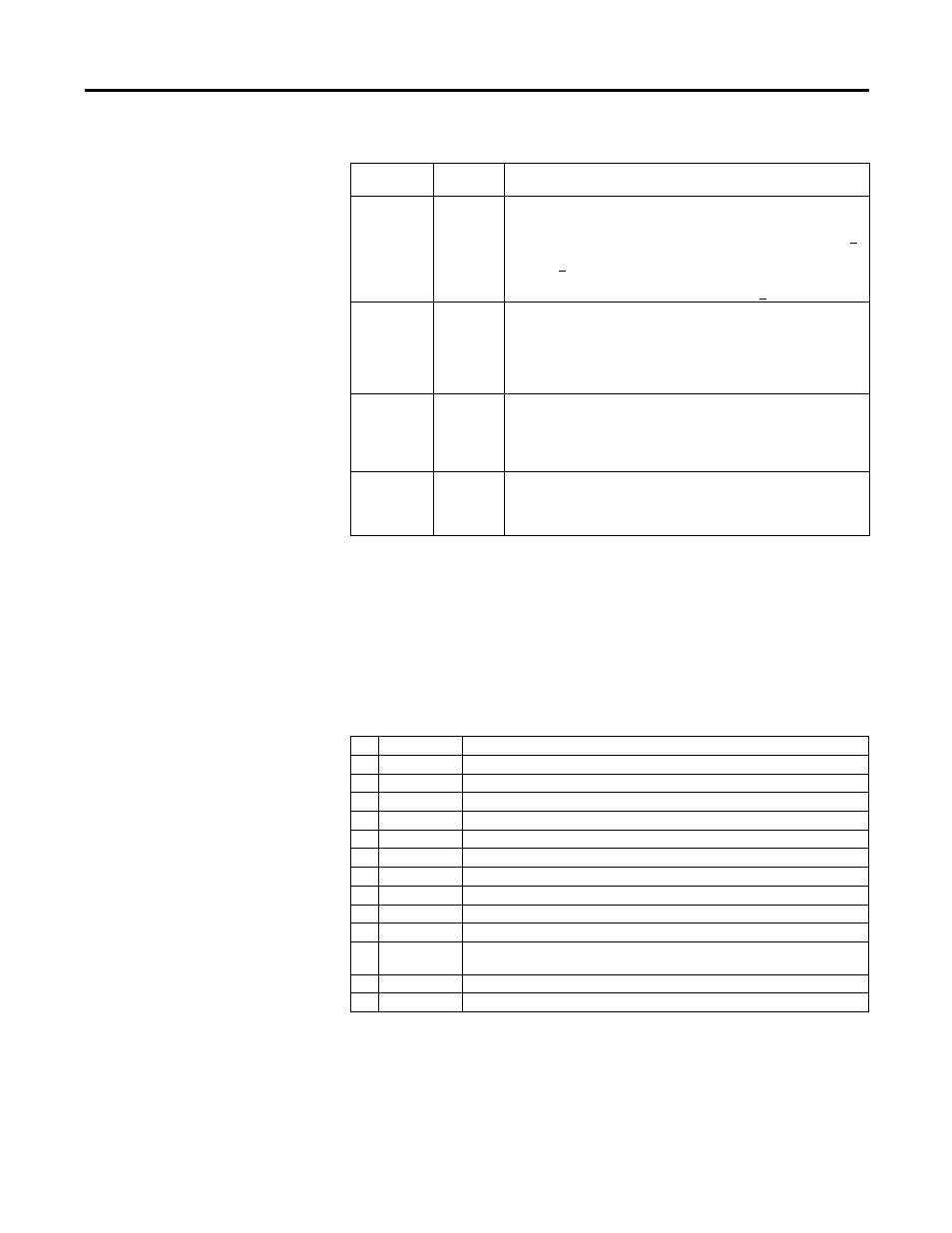
Table 4 - Parameter 1134 Bit 0 “Absolute” and Bit 1 “Incremental” Settings
Note
: When using Absolute mode with an absolute feedback device, actual
position can be redefined by setting parameter 757 [Abs Posit Offset]. For
example, to redefine the actual position as 0, set parameter 757 = parameter 762
[Position Fdbk].
Parameter 1135 [PPMP Status] displays current operating status of the Point to
Point Motion Planner.
Table 5 - Parameter 1135 [PPMP Status]
Bit 1
Incremental
Bit 0
Absolute
Description of Operation
0
0
Default mode
Bit 2 “Start” of parameter 1135 [PPMP Status] is not used in this mode.
The commanded position from the scale block is noted, call it value X.
The drive then takes the difference between any new commanded input
and value X and then adds that difference to the exiting position. I.e., if
the drive is at a stand still, it will remain at a stand still when enabled.
Subsequent moves are absolute with an offset of X.
0
1
Absolute mode
Absolute mode is event driven. On the leading edge of bit 2 “Start” of
parameter 1135 [PPMP Status], a move profile is initiated to
commanded absolute position. The “Start” bit must be cleared before
another move is recognized. Absolute position is contained in
parameter 763 [Position Actual] from the drive’s position regulator.
1
0
Incremental mode
An incremental move is event driven. Upon receipt of the leading edge
of bit 2 “Start” of parameter 1135 [PPMP Status], a move profile is
initiated that increments the output position by the specified amount.
The “Start” bit must be cleared before another move is recognized.
1
1
Immediate mode
Bit 2 “Start” of parameter 1135 [PPMP Status] is not used. The
command interpreter acts immediately. A move profile is initiated to
commanded absolute position.
Bit Bit Name
Description
0
Absolute
Acknowledge Absolute mode
1
Incremental
Acknowledge Incremental mode
2
Start
Acknowledge a Start move
3
(Reserved)
Not used
4
Scaling En
Input Scaling is enabled
5
Over Ride En
The velocity override multiplier is enabled
6
S Curve En
“S” curve is enabled
7
Cond Hold
Conditional hold is enabled
8
Pause
A Pause is active
9
Re-Synch
A Re-synchronization of the output position to the actual position is active
10
Zero Speed
Profile velocity output command has reached zero. Note, actual position
regulator output velocity may not have reached zero.
11
Done
A move has been completed to commanded position
12
Running
ENABLE