Example – Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 93
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
93
Detailed Drive Operation Chapter 1
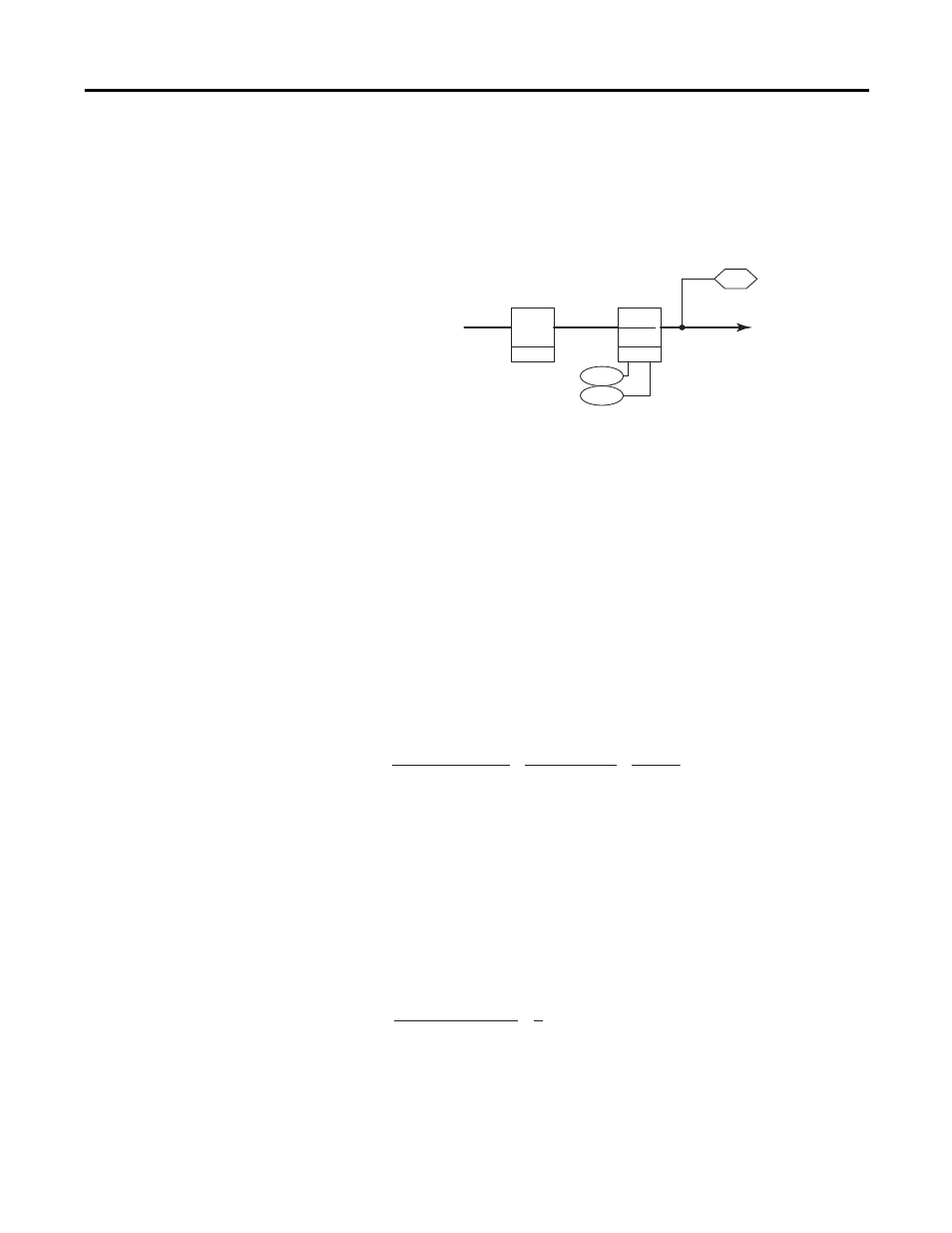
Setting the Electronic Gear Ratio and Speed Reference Scaling
The position reference can be scaled by using the Electronic Gear Ratio (EGR)
scaling. Parameters 745 [PositRef EGR Mul] and 746 [PositRef EGR Div] are
used to scale the position reference.
Example:
In this example the encoders are mounted on the motors. The motors are directly
coupled to the load and we want the follower to run at four (4) times the speed of
the master.
where:
where:
Solving for the lowest common denominator, the 1024 values on the top
and bottom cancel out so that:
Therefore, parameter 745 [PositRef EGR Mul] = 4 and parameter 746
[PositRef EGR Div] = 1. This will set up the position loop of the follower
to move four (4) counts for every one (1) count of the master.
PPRm
= 1024 PPR
PPRf
= 1024 PPR
Ratiof:Ratiom
= 4:1
PPRm
= the PPR of the master encoder
PPRf
= the PPR of the follower encoder
Ratiof:Ratiom
= the desired ratio between the follower speed and the master speed
CPRf
= the counts per revolution of the follower feedback device. For an incremental
encoder this is four (4) times the encoder PPR. For a Stegmann Hi-Resolution
encoder this is 1048576. For a resolver this is 65536.
CPRm
= the counts per revolution of the master encoder. For an incremental encoder this
is four (4) times the encoder PPR. For a Stegmann Hi-Resolution encoder this is
1048576. For a resolver this is 65536.
Gear Rat
[ N ]
[ D ]
745
746
PositRef EGR Mul
PositRef EGR Div
744
PositRef EGR Out
Geared Position
Reference
Selected Position
Reference
Deriv
Δ
1
4096
4
4096
Div]
EGR
[PositRef
Mul]
EGR
[PositRef
x
x
=
x
x
=
Ratiom
CPRm
Ratiof
CPRf
1
4
Div]
EGR
[PositRef
Mul]
EGR
[PositRef
=