Rockwell Automation 20D PowerFlex 700S AC Drives with Phase II Control Reference Manual User Manual
Page 162
162
Rockwell Automation Publication PFLEX-RM003E-EN-E - January 2011
Chapter 1 Detailed Drive Operation
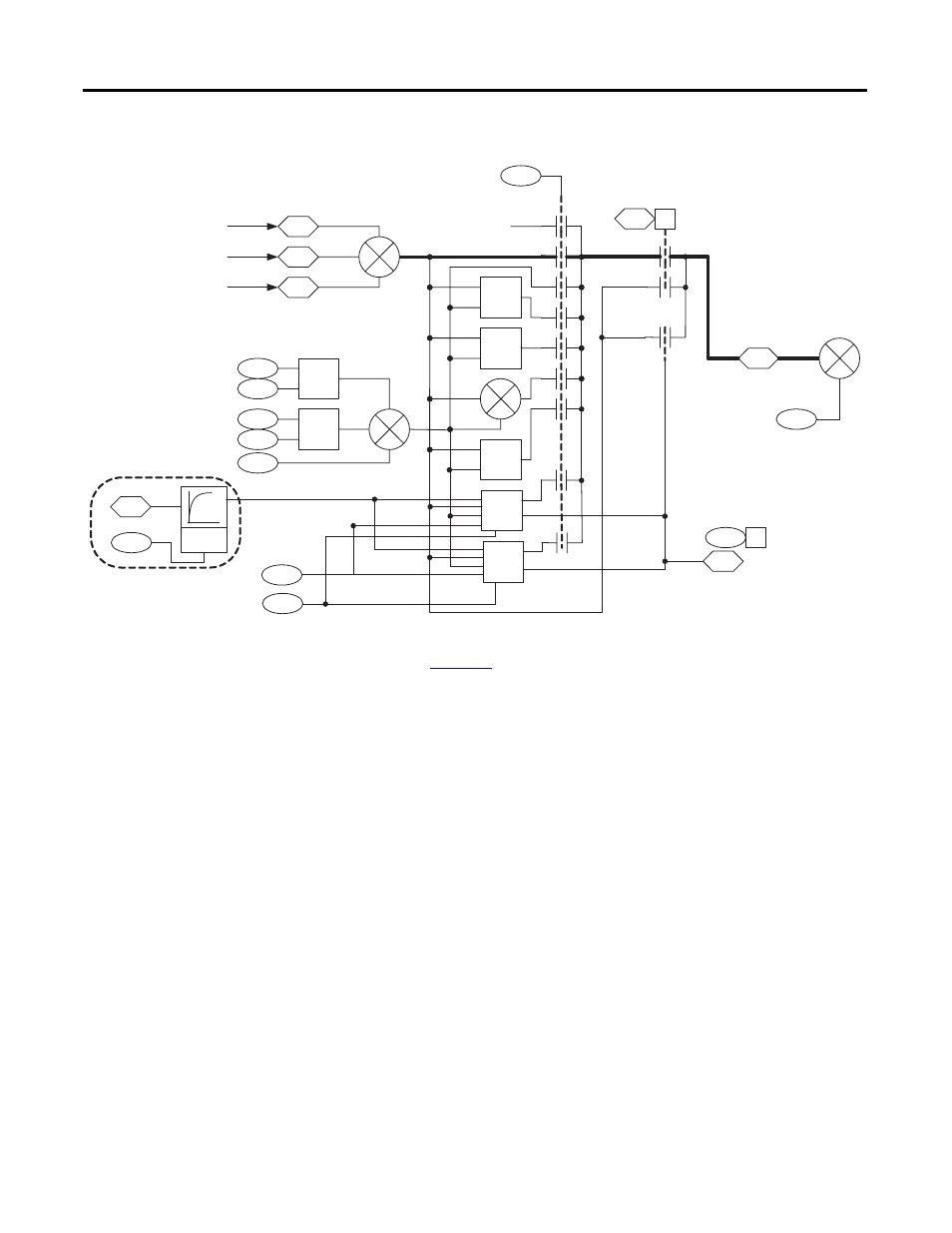
Figure 25 - Firmware Flowchart
, parameter 110 [Speed/TorqueMode], is used to select the
mode of operation. Zero torque current is allowed when set to “0”.
Set to a value of 1 “Speed Reg”, the drive and motor are operated in speed mode.
The torque command changes as needed to maintain the desired speed. This is
the default setting.
Set [Speed/TorqueMode] to a value of 2 “Torque Ref ” for torque mode. In
torque regulation mode, the drive controls the desired motor torque. The motor
speed is the result of torque command and load present at the motor shaft.
“Min” and “Max” mode are selected by values “3” and “4”, respectively. These
modes offer a combination of speed and torque operation. The algebraic
minimum or maximum of speed/torque will be the operating point for the “Min”
and “Max” modes. The drive automatically switches from speed to torque mode,
or from torque to speed mode, based on the dynamics of the motor/load.
The “Min” mode is typically used with positive torque and forward speed
operation, the minimum of the two being closest to zero. The “Max” mode is
opposite, typically used with reverse speed and negative torque, the maximum
being the least negative (closest to zero).
59
302
69
Min
Max
Abs
Min
0
1
2
3
4
5
6
111
X
112
113
114
115
Spd Reg PI Out
[5H4]
FricComp Trq Add
[4G4]
Inertia Trq Add
[4H5]
Torque Ref 1
Torque Ref 1 Div
Torque Ref 2
Torque Ref 2 Mult
Torque Trim
Spd/TorqueMode
0
0
1
157
10
116
Torque Step
Logic Ctrl State
(Forced Spd )
from Speed Control
/
319
Selected Trq Ref
+
+
+
+
+
+
+
+
+
+
110
7
8
Slat
Min
Slat
Max
1
89
100
Speed Error
2
nd
Order
LPass
Filter
119
120
SLAT ErrorSetpnt
SLAT Dwell Time
Spd Reg TP Data
109
108
48
[5C4]
Spd Reg TP Sel