1 control method selection – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 83
5.1 Control Method Selection
5-3
5
Op
er
at
io
n
5.1
Control Method Selection
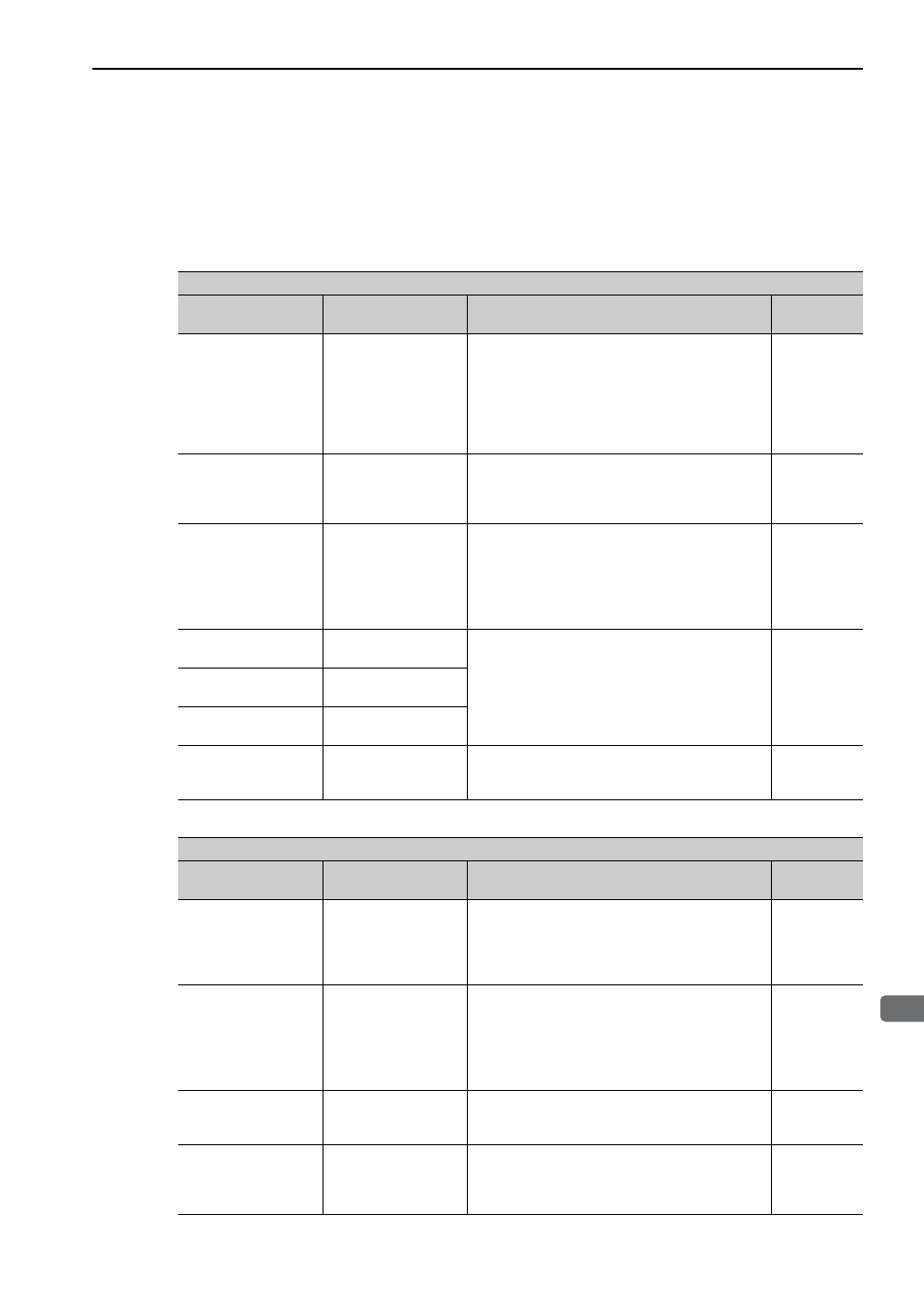
The control method supported by the SGDV SERVOPACK are described below.
The control method can be selected with parameter Pn000.
Analog Voltage Reference (Model: SGDV-
ES1A)
Pulse Train Reference (Model: SGDV-
EP1A)
Control Method Selection
Pn.000.1
Control
Description
Reference
Section
n.
0
[Factory setting]
Speed Control
Controls servomotor speed by means of an analog
voltage speed reference. Use in the following
instances.
• To control speed
• For position control using the encoder pulse out-
put from the SERVOPACK to form a position
loop in the host controller.
5.3 Speed
Control (Ana-
log Voltage
Reference)
n.
2
Torque Control
Controls the servomotor’s output torque by means of
an analog voltage torque reference. Use to output the
required amount of torque for operations such as
stopping on contact.
5.5 Torque
Control (Ana-
log Voltage
Reference)
n.
3
Internal Set Speed Con-
trol
Uses the three input signals /P-CON (/SPD-D), /P-
CL (/SPD-A), and /N-CL (/SPD-B) to control the
speed as set in advance in the
SERVOPACK
. Three
operating speeds can be set in the
SERVOPACK
.
When selecting this control, an analog reference is
not necessary.
5.6 Internal
Set Speed
Control
n.
4
Internal Set Speed Con-
trol
↔
Speed Control
These are switching modes for using the three con-
trol methods given above in combination.
Select the control switching method that best suits
the application.
5.7 Combina-
tion of Control
Methods
n.
6
Internal Set Speed Con-
trol
↔
Torque Control
n.
9
Torque Control
↔
Speed Control
n.
A
Speed Control
↔
Speed
Control with Zero
Clamp Function
The zero clamp function can be used in speed con-
trol.
5.3.5 Zero
Clamp Func-
tion
Control Method Selection
Pn.000.1
Control
Description
Reference
Section
n.
1
[Factory setting]
Position Control
Controls the position of the machine by means of a
pulse train position reference.
Controls the position with the number of input
pulses, and controls the speed with the input pulse
frequency. Use when positioning is required.
5.4 Position
Control (Pulse
Train Refer-
ence)
n.
3
Internal Set Speed Con-
trol
Uses the three input signals /P-CON (/SPD-D), /P-
CL (/SPD-A), and /N-CL (/SPD-B) to control the
speed as set in advance in the
SERVOPACK
. Three
operating speeds can be set in the
SERVOPACK
.
When selecting this control, an analog reference is
not necessary.
5.6 Internal
Set Speed
Control
n.
5
Internal Set Speed Con-
trol
↔
Position Control
These are switching modes for using the two control
methods given above in combination.
5.7 Combina-
tion of Control
Methods
n.
B
Position Control
↔
Position Control with
Reference Pulse Inhibit
Function
The reference pulse inhibit function can be used in
position control.
5.4.8 Refer-
ence Pulse
Inhibit Func-
tion