Analog – Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 289
10.2 List of Parameters
10-7
10
Ap
pend
ix
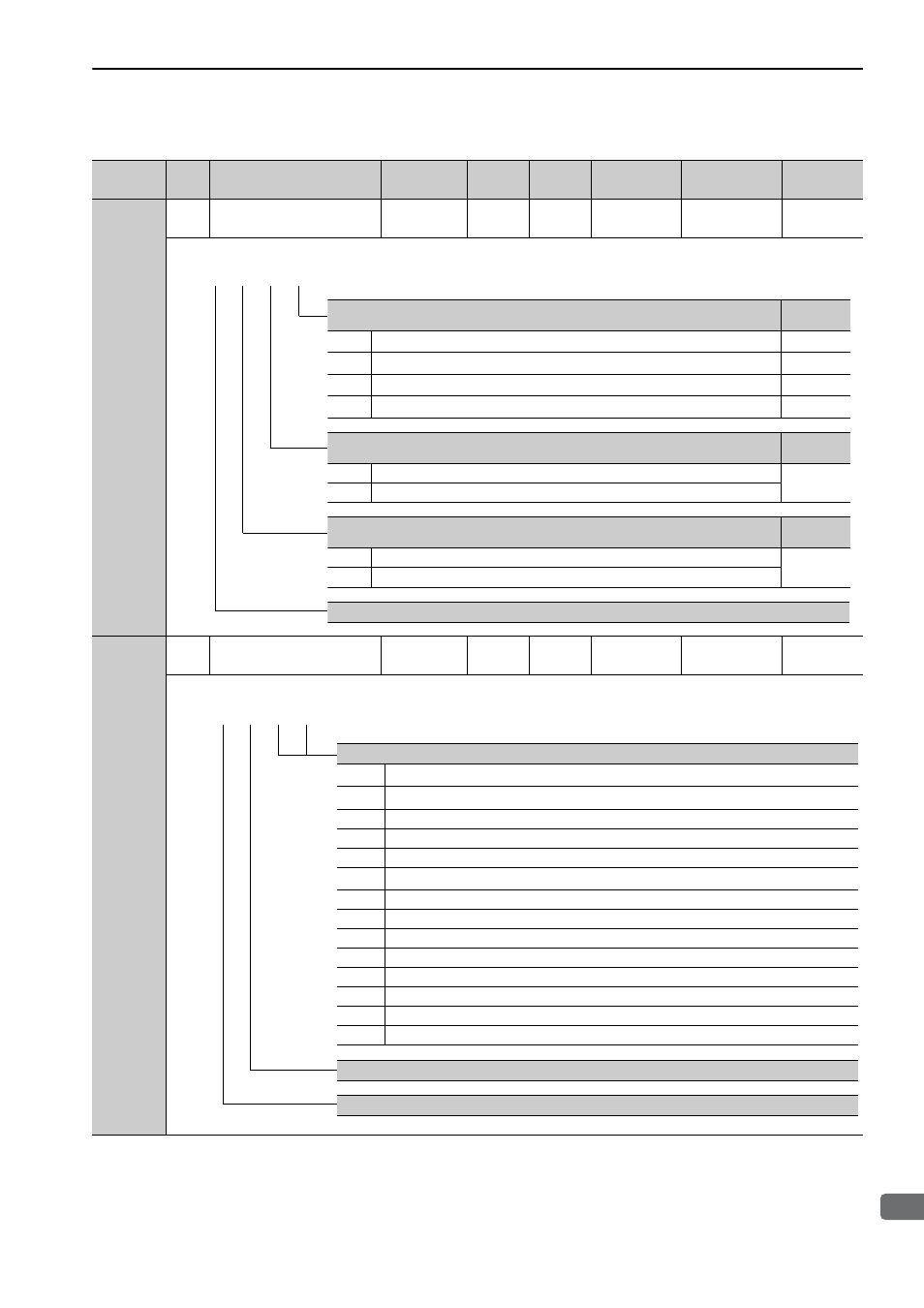
Pn002
2
Application Function Select
Switch 2
0000 to 4113
−
0000
After restart
Setup
−
Pn006
2
Application Function Select
Switch 6
0000 to 005F
−
0002
Immediately
Setup
6.1.3
(cont’d)
Parameter
No.
Size
Name
Setting
Range
Units
Factory
Setting
When
Enabled
Classification
Reference
Section
4th 3rd 2nd 1st
digit digit digit digit
n.
Analog
Speed/Position Control Option (T-REF Terminal Allocation)
Reference
Section
0
T-REF not allocated
–
1
Uses T-REF as an external torque limit input.
5.8.3
2
Uses T-REF as a torque feedforward input.
6.9.2
3
Uses T-REF as an external torque limit input when /P-CL and /N-CL are ON.
5.8.4
Torque Control Option (V-REF Terminal Allocation)
Reference
Section
0
V-REF not allocated
5.5.4
1
Uses V-REF as an external speed limit input.
Absolute Encoder Usage
Reference
Section
0
Uses absolute encoder as an absolute encoder.
5.9
1
Uses absolute encoder as an incremental encoder.
Reserved (Do not change.)
Analog Monitor 1 Signal Selection
00
Motor rotating speed (1 V / 1000 min
-1
)
01
Speed reference (1 V / 1000 min
-1
)
02
Torque reference (1 V/100% rated torque)
03
Position error (0.05 V/1 reference unit)
04
Position amplifier error (after electronic gears) (0.05 V/ 1 encoder pulse unit)
05
Position reference speed (1 V / 1000 min
-1
)
06
Reserved (Do not change.)
07
Reserved (Do not change.)
08
Positioning completion (positioning completed: 5 V, positioning not completed: 0 V)
09
Reserved (Do not change.)
0A
Torque feedforward (1 V/100% rated torque)
0B
Active gain (1st gain: 1 V, 2nd gain: 2 V)
0C
Completion of position reference (completed: 5 V, not completed: 0 V)
0D
Reserved (Do not change.)
Reserved (Do not change.)
Reserved (Do not change.)
4th 3rd 2nd 1st
digit digit digit digit
n.