Yaskawa Σ-V Series AC Servo Drives Rotational Motor Analog Voltage Reference User Manual
Page 272
9.1 Alarm Displays
9-13
9
Trou
blesh
ooting
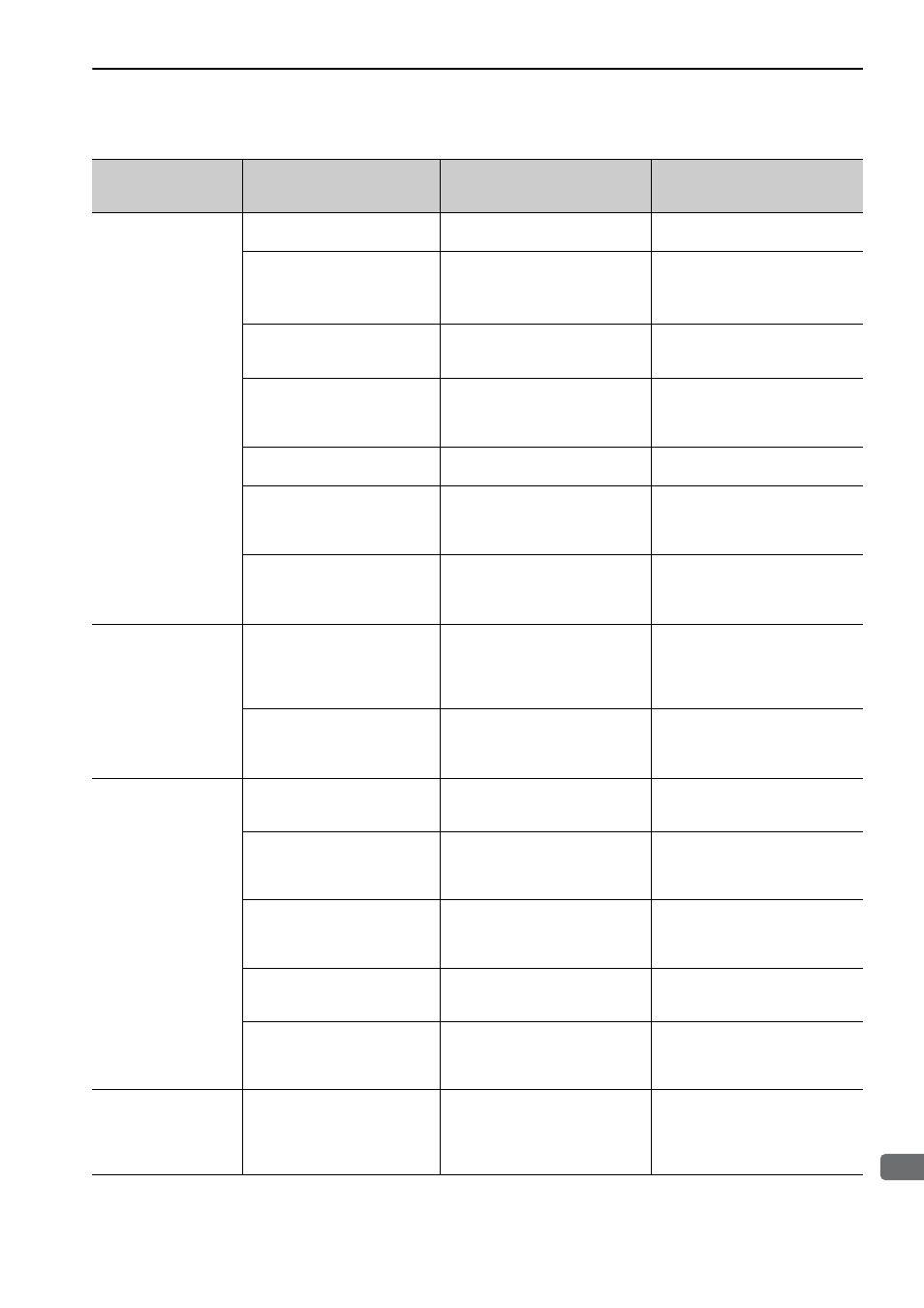
A.Cb0:
Encoder Echoback
Error
The wiring and contact for
encoder cable are incorrect.
Check the wiring.
Correct the wiring.
Noise interference occurred due
to incorrect cable specifications
of encoder cable.
−
Use tinned annealed copper
shielded twisted-pair or screened
unshielded twisted-pair cable with a
core of at least 0.12 mm
2
.
Noise interference occurred
because the wiring distance for
the encoder cable is too long.
−
The wiring distance must be 50 m
max.
The FG potential varies because
of influence from machines on
the servomotor side, such as the
welder.
Check the cable layout for encoder
cable.
Properly ground the machines to
separate from encoder FG.
Excessive vibration and shocks
were applied to the encoder.
Check the operating environment.
Reduce the machine vibration or
correctly install the servomotor.
An encoder fault occurred.
−
Restart the SERVOPACK. If the
alarm still occurs, the servomotor
may be faulty. Replace the servo-
motor.
A SERVOPACK fault occurred.
−
Restart the SERVOPACK. If the
alarm still occurs, the SERVO-
PACK may be faulty. Replace the
SERVOPACK.
A.CC0:
Multiturn Limit
Disagreement
The multiturn limit value of the
encoder is different from that of
the SERVOPACK. Or, the multi-
turn limit value of the SERVO-
PACK has been changed.
Check the value of the Pn205 of the
SERVOPACK.
Execute Fn013 at the occurrence of
alarm.
A SERVOPACK fault occurred.
−
Restart the SERVOPACK. If the
alarm still occurs, the SERVO-
PACK may be faulty. Replace the
SERVOPACK.
A.d00
*4
:
Position Error
Overflow
(Position error exceeded
the value set in the
excessive position error
alarm level (Pn520).)
The servomotor U, V, and W wir-
ings is faulty.
Check the servomotor main circuit
cable connection.
Confirm that there is no contact
fault in the motor wiring or encoder
wiring.
The frequency of the position ref-
erence pulse is too high.
Reduce the reference pulse fre-
quency, and operate the SERVO-
PACK.
Reduce the position reference pulse
frequency or acceleration of posi-
tion reference. Or, reconsider the
electronic gear ratio.
The acceleration of the position
reference is too high.
Reduce the reference acceleration,
and operate the SERVOPACK.
Apply the smoothing function, such
as using position reference accelera-
tion/deceleration time constant
(Pn216).
Setting of the excessive position
error alarm level (Pn520) is low
against the operating condition.
Check the alarm level (Pn520) to
see if it is set to an appropriate
value.
Set the Pn520 to proper value.
A SERVOPACK fault occurred.
−
Restart the SERVOPACK. If the
alarm still occurs, the SERVO-
PACK may be faulty. Replace the
SERVOPACK.
A.d01
*4
:
Position Error
Overflow Alarm at
Servo ON
This alarm occurs if the servomo-
tor power is turned ON when the
position error is greater than the
set value of Pn526 while the ser-
vomotor power is OFF.
Check the position error amount
(Un008) while the servomotor
power is OFF.
Set position error to be cleared
while the servomotor power is OFF.
Or, correct the excessive position
error alarm level at servo ON
(Pn526).
∗4.
This alarm will occur only for a SERVOPACK for pulse train references.
(cont’d)
Alarm Number:
Alarm Name
(Alarm Description)
Cause
Investigative Actions
Corrective Actions